

xooon
-
Postów
40 -
Dołączył
-
Ostatnia wizyta
Typ zawartości
Profile
Forum
Blogi
Wydarzenia
Galeria
Pliki
Sklep
Articles
Market
Community Map
Odpowiedzi opublikowane przez xooon
-
-
Witam!
Zastosowane rozwiązanie wydaje się sensowne. Ograniczenie prądu do ok. 250mA również stanowi rozsądny kompromis pozwalający na uruchomienie kanału guide z jednej strony z bezpiecznym prądem z drugiej strony.
Rozwiązanie to ma jednak swoje ograniczenia, może być zastosowane wyłącznie do portów guide typu "ST4" z prądem nie większym niż 250mA. Niestety, rzadko można spotkać pełny opis portu guide i nie wiadomo do końca jakiego prądu można się spodziewać podczas wysterowania kanału ale prawdopodobnie są to ułamki mA dla portów z elementami aktywnymi lub co najwyżej kilkadziesiąt mA dla wejść przekaźnikowych.
A może sprawdzisz po prostu jaki to prąd za pomocą miernika? Jeśli faktycznie to ułamki mA wtedy zamiast 47 omów można wstawić opornik 4.7k i krytycy tego rozwiązania uzyskają satysfakcję. Posiadacze napędów innego typu z portem ST4 mogą to rozwiązanie dopasować do własnych potrzeb mierząc prąd w swoich warunkach.
xooon
-
Nowa cena -> 599PLN + 20 PLN za przesyłkę
Oferta ważna wyłącznie do końca środy 28.06.2017
Kontakt wyłącznie przez xooon@o2.pl
-
Nowa cena -> 649PLN + 20PLN za przesyłkę.
xooon
-
Dziękuję za wskazane informacje. Muszę zacząć od instalacji platformy ASCOM i przyjrzeniu się istniejącym już elementom choć czasu ostatnio nie mam za wiele :-(
Zapewne przyda się kontrolka połączenia COM ale część dotyczącą "tłumaczenia" poleceń ASCOM na reakcje własnego sterownika muszę napisać sam.
Zapewne w odpowiednim momencie ponownie poproszę o Waszą radę licząc jak obecnie na niezawodną pomoc :-)
xooon
-
Nowa cena -> 699PLN + 20PLN za przesyłkę
xooon
-
Korzystając z okazji, że w temacie wypowiedzieli się chyba koledzy dobrze poinformowani i z doświadczeniem praktycznym, zapytam, gdzie znaleźć opis funkcji poszczególnych, gotowych modułów (driver-ów) działających na platformie ASCOM. Dla przykładu, jeśli chciałbym kontrolować mój sterownik napędu (elektronika) za pomocą gotowego modułu ASCOM -> EQMOD, gdzie, znaleźć polecenia i ich opis w jakie wyposażony jest właśnie moduł EQMOD. Przykładowo, wyobrażam sobie, że istnieje w driverze EQMOD polecenie przesunięcia o określony kąt. Jak wygląda składnia tego polecenia, w jakiej formie należy podać argumenty i jaki jest wynik takiego polecenia? Na razie znalazłem tylko taki link http://eq-mod.sourceforge.net/tutindex.html gdzie jednak nie znalazłem potrzebnej informacji.
A może po prostu źle szukam?
xooon
-
Świetnie zaznaczyłeś sposób i miejsce działania klina. Faktycznie, w momencie startu obie części powinny być równoległe ale wydaje się, że brakujące milimetry w wysunięciu śruby nie są intuicyjnie istotne choć nie próbowałem tego przeliczyć. Ale jeśli chcesz mieć absolutna pewność ominięcia tego błędu (uproszczenia) to podnieś klin o te brakujące milimetry wstawiając pod niego podkładkę o odpowiedniej wysokości. Ale może po prostu spróbuj działania tego korektora bo sadzę, że trudno będzie wychwycić w pracy wpływ takich detali jak nierównoległość elementów w momencie startu lub niepunktowość styku główki śruby z klinem.
xooon
-
Jeśli wszystko dzieje się na terenie Twojej posesji to może właściwym rozwiązaniem jest zastosowanie zwykłego kabla UTP do połączenia obu komputerów ze sobą. Standard Ethernet określa długość takiego połączenia do 90m oraz do 5m patch kabli z obu stron (w sumie 100m) więc z odległością nie powinieneś mieć problemów. Kabel można po prostu rozwinąć na czas połączenia. Gotowy do użycia kabel o długości 30m można zakupić np. tu: http://allegro.pl/kabel-sieciowy-lan-ethernet-rj45-cat5e-30m-utp-skr-i6760459979.html
Kabel można wpiąć bezpośrednio do przełącznika domowej sieci lokalnej bez żadnych modyfikacji lub wprost do stacji roboczej w domu ale wtedy należy zmienić wtyk z jednej strony kabla krzyżując pary 1 i 2 (w razie potrzeby pokażę jak to zrobić). Taki kabel mógłby być ułożony także w ziemi (na głębokości większej niż ok. 70cm) przy okazji prowadzenia zasilania do astrobudki.
W każdym jednak wypadku jakieś oprogramowanie do zdalnej kontroli będzie potrzebne.
Pamiętaj jednak, że niezależnie od połączenia zdalnego najważniejsze jest prawidłowe zasilanie urządzeń w astrobudce i na to powienieneś zwracać szczególną uwagę. Problem staje się mniej krytyczny jeśli oddalony komputer to laptop z zasilaniem bateryjnym wtedy rozwiązanie z długim kablem ethernet wydaje się najprostszym do zastosowania doraźnego.
xooon
-
Zasilacz impulsowy nie powienien sprawiać kłopotu w pracy z silnikiem krokowym o ile napięcie wyjściowe będzie dobrze filtrowane. Jego zaletą sa niewielkie rozmiary i z reguły brak transformatora przez co również mała masa. W urządzeniach o większej czułości na zakłócenia w.cz. należałoby taki zasilacz traktować z większą rezerwą. A jeśli chodzi o silniki to poza uwagami o jakich pisałem zdarza się, że silniki różnych producentów, o zbliżonych parametrach (skok, oporność uzwojeń) mogą wykazywać różną liniowość i są miejsca w zakresie pełnego obrotu wału silnika gdzie wyraźnie wyczuwa się "skokową" zmianę wielkości skoku silnika. Niemniej, uśredniając ruch w czasie nie musi to mieć znaczenia dla astrofotografi bo dla obserwacji wizualnych jest bez znaczenia.
xooon
-
Faktycznie, pochylenie śruby jest prawdopodobnie nie do odróżnienia w sensie błądu do użycia klina przy prostopadłej śrubie ale w tym przypadku klin jest łatwiejszy do wykonania. Zastanawiam się jednak dlaczego klin ma proporcje 50/5mm zamiast 50/3.7mm jak to wyliczyłem wcześniej? Czy przeoczyłeś to wyliczenie czy też wynikało to z trudności technologicznych? Bez przerabiania klina możesz skorygować rozwiązanie unosząc węższą część klina o: 5.0-3.7=1.3mm w górę. W tak powstałą szczelinę można wlać poxipol dla usztywnienia konstrukcji.
xooon
-
W tym przypadku nie ma miejsca na wybór "nacisku" na jakiś aspekt pracy silnika krokowego. Z fizyki tego urządzenia wynika bezpośrednia zależność pola magnetycznego od prądu sterowania - tylko a moża aż tyle. Pracę mikrokrokową uzyskuje się sterując uzwojenia silnika prądami o kształcie sinusoidalnym z przesunięciem w fazie o 90 stopni. Odpowiedni mikrokrok to schodkowe przybliżenie funkcji sinus - najlepsze efekty daje regulacja prądu (wysokość "schodka") za pomocą modulacji szerokości impulsu.
Oczywiście silnik wysokooporowy będzie działał sterowany mikrokrokowo ale zapewne zauważysz, Behlur_Olderys że poszczególne kroki mają różne długości co wynika z trudności zachowania dla tego silnika funkcji sinus prądu sterowania a ponadto taki silnik będzie miał także: dużą histerezę sterowania objawiającą się różną długościa kroku przy sterowaniu w różnych kierunkach oraz strefą martwą nie pozwalającą na zastosowanie mikrokroku o dowolnie małej wartości. To efekt występujący w każdym silniku ze względu na tzw magnetyzm resztkowy ale w silnikach o małej oporności liniowość pracy będzie lepsza.
Koszt silnika krokowego o małej oporności na znanym portalu to kilka PLN (np. tu http://allegro.pl/silnik-krokowy-stp-42d180-i6702277996.html ) wiec może warto pokusić się o próbę porównania choć może zepsuje to dobry nastrój bo silnik już wybrany etc .....
Jeśli używasz sterownika DRV882x to pamiętaj o kilku zasadach:
- układ jest zasilany dwoma napięciami: jednym co najmniej 8.5V oraz drugim o poziomie TTL (5V - sterowanie)
- układ należy "odsprzężyć" dla każdego z zasilań za pomocą pary kondensatorów 0.1uF oraz co najmniej 100uF dołączonych możliwie blisko wyprowadzeń układu
- zaciski (-) tych elementów powinny być dołączone możliwie blisko wspólnego punktu masy gdzie powinny zbiegać się również ujemne przewody zasilające.
- prąd sterowania silnikami należy ustawić tak aby silnik miał oidpowiedni moment ale aby nie drgał w sposób przypadkowy bez sterowania
- dopuszczalny jest słyszalny stały dźwięk o wysokiej częstotliwości (kilka kHz) pochodzący od sterowania modulacją szerokości impulsu prądowego
Życzę powodzenia w "badaniu" mikrokroków ;-)
xooon
-
Sprzedam nowy napęd Astrowalker 2 , w najnowszej wersji, opisany w wątku na stronie http://www.astromaniak.pl/viewtopic.php?f=5&t=12347
W skład kompletu wchodzi:
- napęd z gwintem fotograficznym 3/4" do mocowania sprzętu astrofotograficznego
- redukcja na gwint fotograficzny 1/4"
- koło biegunowe dla łatwiejszej orientacji na niebie i wyszukania GP
- kabel zasilania
- akumulator 12V/1.2Ah (nie pokazany na zdjęciu)
- obudowa transportowa
Możliwości napędu:
- praca na obu półkulach
- czas pracy do 1h52' z możliwością wykonania dowolnej ilości przerw
- czas przewijania napędu ok. 12'
- ruch napędu zgodny całkowicie z ruchem nieba przez funkcyjną redukcję prędkości w zależności od rozwarcia ramion napędu kontrolowane przez mikroprocesor
- czas pracy na akumulatorze 12V/1.2Ah - ok. 24 godziny
- możliwość użycia guide dla jednej osi (czynny port guide osi Ra w standardzie ST4 - zwarcie pinu do masy)
- optyczny wskaźnik przebytej drogi śledzenia
- automatyczne przewijanie po osiągnięciu położenia końcowego (po upływie 1h52')
- nośność co najmniej kilka kg, testowana nośność > 15kg z odpowiednim rozłożeniem ciężaru
- waga ok. 1kg
- rozmiary opakowania transportowego ok. 44x10x6cm
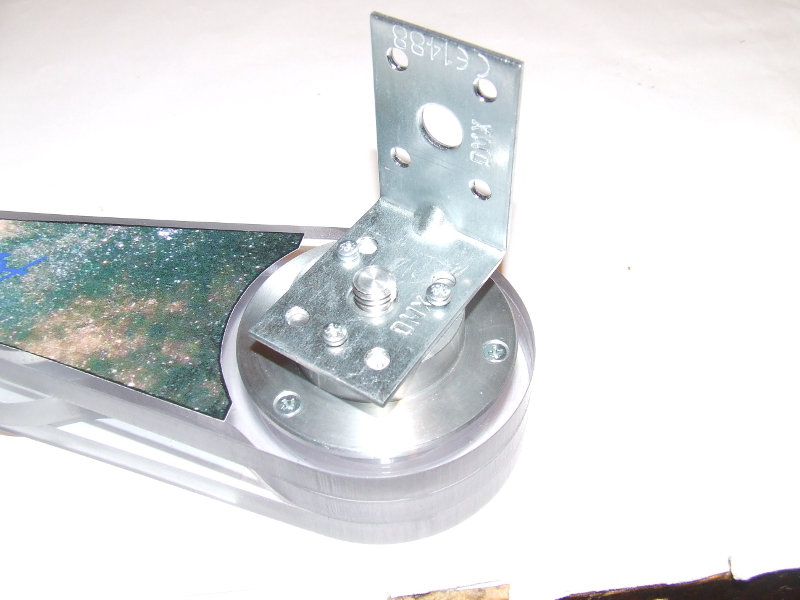
Napęd można wykorzystać wprost do astrofotografii montując na nim aparat fotograficzny z odpowiednim obiektywem (do 500mm) lub niewielką lunetę/teleskop w przypadku obserwacji wizualnych. Zdjęcie pokazuje jedną z możliwości zamontowania we własnym zakresie wspornika dla sprzetu obserwacyjnego lub fotograficznego.
Cena 799PLN + 20PLN za przesyłkę
Kontakt -> xooon@o2.pl

-
Układy DRV8824 i 25 są niemal identyczne. Funkcjonalnie są dokładnie takie same z jedną różnicą: Układ 8825 ma inną konstrukcję mechaniczną - ułatwiającą odprowadzenie ciepła więc ma większą wydajność prądową - o ile pamiętam do 2.5A na uzwojenie. Te maksymalne prądy w obu przypadkach osiąga się z resztą z użyciem radiatorów jakie powinny być w fabrycznym komplecie tego sprzętu.
Ja radzę stosować silniki o niskiej oporności uzwojeń. Optymalne wartości to 2-5 omów. W ten sposób można w najlepszy sposób wykorzystać pracę mikrorkową. Nawet niewielkie prądy uzwojeń, rzędu 0.3-0.5A dają naprawdę spory moment silnika z niską opornością uzwojeń. Silniki o dużej oporności, z reguły opisywane, że pracują z napięciem 12V (oporność uzwojenia 20-30 omów) i więcej nie nadają się zbyt dobrze do pracy mikrokrokowej ale za to całkiem dobrze radzą sobie w pracy pełnokrokowej lub półkrokowej w sposób klasyczny. Mam tu na myśli sterowanie uzwojeń pełnym napięciem zasilania odpowiednio do pracy pełno lub półkrokowej a nie pracy na zasadzie na jakiej działają układy DRV. One wykorzystują bowiem sterowanie z tzw. modulacją szerokości impulsu dla osiągnięcia zamierzonego celu (praca mikrokrokowa).
Ogólnie mówiąc, silnik krokowy to urządzenie elektromagnetyczne gdzie ruch wirnika wynika z wzajemnych oddziaływań pól magnetycznych - magnesu stałego i zmiennego pola magnetycznego w stojanie. Pole magnetyczne zależy wprost od prądu jaki płynie w uzwojeniach dlatego analizując pracę silnika i jego sterowanie powinno się w zasadzie mówić nie o napięciu zasilania ale o prądzie jaki płynie przez uzwojenia. Modulacja szerokości impulsu jest najlepsza metodą regulacji prądu sterowania dla sterowania mikrokrokowego. Świetnie spisuje się dla silników o niskiej oporności (co pociąga także niską indukcyjność) a gorzej dla silników z wysoką opornością uzwojeń (większa indukcyjność uzwojeń). Właśnie duża indukcyjność uzwojeń silników "wysokonapięciowych" powoduje, że sterowanie mikrokrokowe nie jest tak skuteczne jak dla silników "niskonapięciowych" bo czas narastania pożądanej wartości prądu wydłużany jest przez dużą indukcyjność uzwojeń takiego silnika. Ten efekt można nieco zmniejszyć zasilając silnik z wysokiego napięcia - w niektórych zastosowaniach nawet kilkadziesiąt V.
Tak więc proponuję Ci Behlur_Olderys , znaleźć jakieś silniki 1.8 stopnia o małej oporności i zasilać z typowego napięcia 12V o wydajności ok. 1A a sporo problemów przestanie istnieć ;-)
xooon
-
 1
1
-
-
Potrzebuję wymienić łożyska na ślimaku. Te które teraz są założone są bardzo drogie 280zł za sztukę. Znalazłem tańsze i nawet lepsze, bo dwurzędowe skośne, ale nie mieszczą się do obudowy. Potrzebuję ztoczyć z obu stron ślimak po 3mm. Ślimak ma rowki do zamocowania w tokarce. Czy możecie polecić tokarza z Warszawy lub okolicy (Łomianki, Legionowo itp.), który podejmuje się jednostkowych zleceń i potrafiłby to precyzyjnie zrobić?.
A może wyjściem jest któraś z ofert z linku?
https://allegro.pl/kategoria/przemysl?string=toczenie&order=m&bmatch=s0-com-1-1-0511
xooon
-
Załączam uproszczony rysunek gdzie i jak zastosowa klin:
Jak pisałem wcześniej, klin powienien mieć wymiary boczne zgodne z podanymi wyliczeniami a więc np. oba ramiona trójkąta po 50mm, trzeci bok trójkata 3.7mm a szerokość poprzeczna klina powinna być większa niż wymiary końcówki śruby mikrometrycznej. Jak wykonasz klin z poliwęglanu o grubości 10mm to wystarczy jak zeszlifujesz na gładko powierzchnię styku śruby i klina a jeśli klin wykonasz np. z drewna to warto na odcinku styku klina ze śrubą nałożyć twardą warstwę poślizgową. Sugerowałem naklejenie połowy żyletki ale może to być np. blaszka stosowana w opakowaniach.
xooon
-
Pytałem, bo odcinek S - A może nie powinien być płaski, lecz mieć jakiś duży promień. Albo parabola.
Masz rację, że w rozwiązaniu dokładnym ten odcinek będzie prawdopodobnie pochodną funkcji trygonometrycznej ale w zakresie tego ruchu jakim dysponujesz ze swoją śrubą mikrometryczną, przybliżenie liniowe jest w pełni uzasadnione a błędy przybliżenia nie będą mieć znaczenia. Prawdopodobnie, nawet nie byłbyś w stanie zrobić wymaganej krzywizny bo jej odstępstwo od liniowości jest mniejsze niż błąd działania dostępnych narzędzi.
Ważniejsze jest to, że po 20 minutach ruchu błąd prowadzenia nie wyniesie 80arcsec a raczej pojedyncze arcsec co i tak dla ogniskowych z jakimi działasz będzie o rząd lepiej niż potrzeba.
Zaokrąglenie i smukłość końcówki śruby są istotne ale znowu, jeśli nawet nie są doskonałe to i tak z powodu niewielkiego zakresu ruchu błąd jaki stąd wyniknie nie powinien mieć znaczenia.
Klin możesz zrobić nawet z drewna i pokryć jego aktywną stronę (np. nakleić), w miejscu gdzie będzie działać sruba np. połówką żyletki. Jest to dość twarda stal z jednej strony a jednocześnie element o wystarczająco dobrym poślizgu.
xooon
-
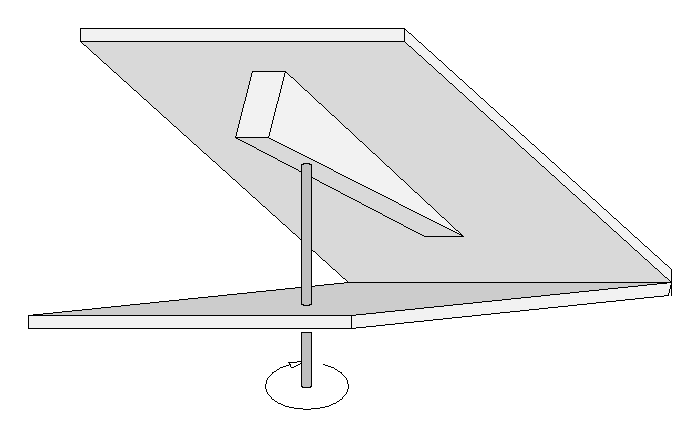
Załączam obiecany rysunek klina korekcyjnego. Rysunek pokazuje dużo większy kąt jaki wykonuje ruchoma płyta koziołka niż to ma miejsce w rzeczywistości właśnie po to aby lepiej zauważyć dlaczego taki klin ma sens i w którym miejscu należy go zastosować
W momencie startu obie części koziołka: płyta nieruchoma O-N i płyta ruchoma O-R leżą w tym samym miejscu (są równoległe) a śruba dotyka płyty ruchomej w punkcie S.
Następnie śruba wysuwając się unosi płytę ruchomą do położenia O-R' a sama śruba wysuwa się na wysokość H przesuwając się jednocześnie po ruchomej części kozioła na odległość S'-A właśnie do punktu A.
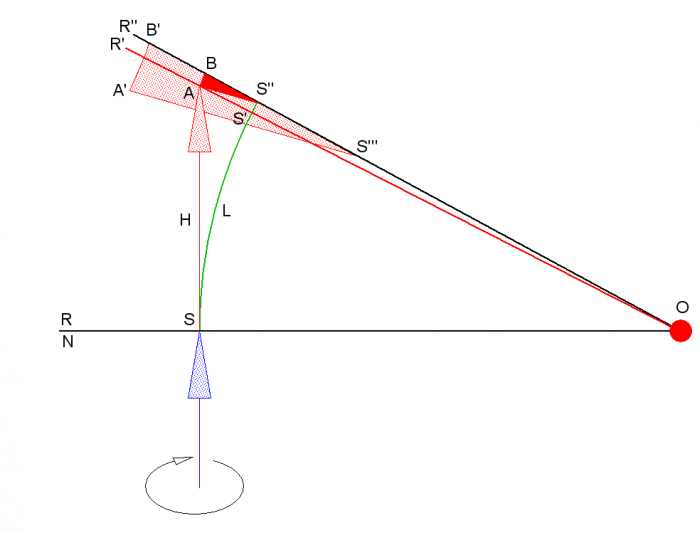
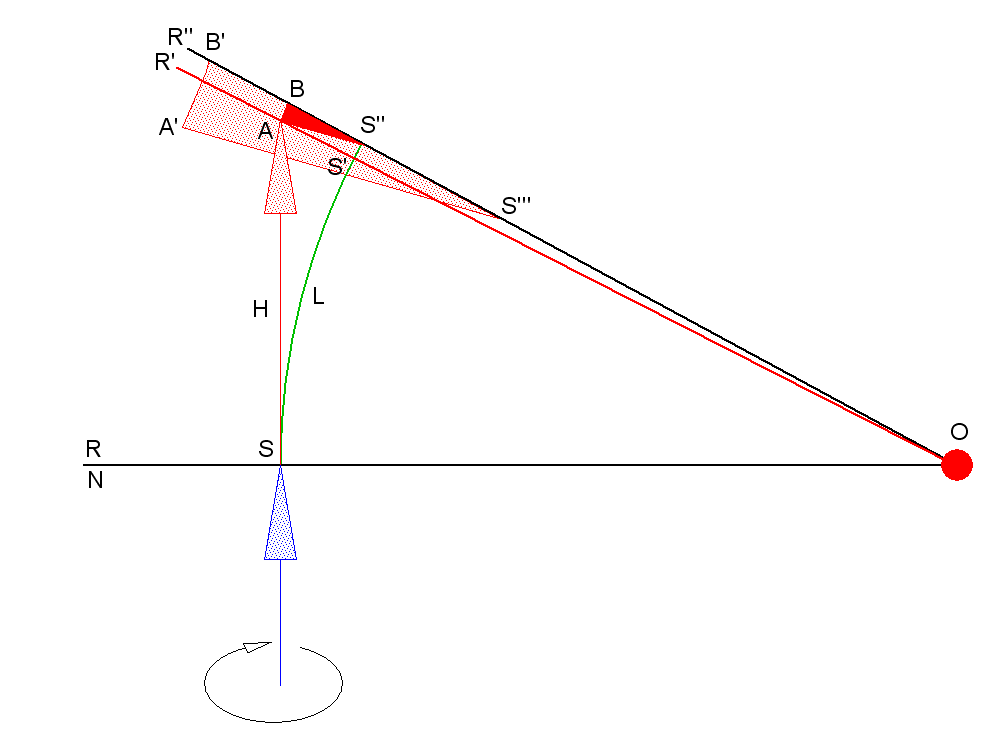
Gdyby ruch płyty ruchomej odbywał się z prędkością nieba to ta przesunęła by się po łuku L na odległość liczoną wzdłuż łuku właśnie o wielkości H. Dla małych kątów, w mierze łukowej odległość ta jest równa kątowi i to jest to uproszczenie obliczeń o jakim pisałem wcześniej.
Tak więc, idealnie przesuwana po łuku płyta ruchoma oddali się na nim na odległość równą H (L=H) i powinna znaleźć się w pozycji O-R".
Brakującą odległość, między ruchem rzeczywistym a idealnym, wypełnia właśnie opisany wcześniej klin S"-A-B, który podnosi ruchomą płytę tym wyżej im ruch trwa dłużej - wszystko oczywiście w granicach kiedy ruch można uznać za liniowy.
Zamiast małego klina oznaczonego na rysunku na czerwono można zastosować większy klin - A'-B'-S''' - na rysunku w kolorze różowym, zachowujący proporcje boków jakie ma mały klin. Ten klin należy ułożyć właśnie wzdłuż ruchomej części koziołka szerszą częścią na zawnątrz.
I to właśnie sugerowałem uprzednio aby użyć stalowej szpachelki ułożonej tak jak na rysunku na odcinku A'-S''' a więc uniesionej na zewnątrz na odpowiednią wysokość z przestrzenią pomiędzy szpachelką a ruchomą częścią wypełnioną materiałem trudnym do ugięcia - na przykład klejem poxipol 10 minut.
Dodatkowo, śruba unosząca ruchomą płytę powinna mieć zaokrąglony i wydłużony kształt aby ruch zbliżał się w rzeczywistości do założeń teoretycznych.
xooon
-
Dzięki za wyliczenia xooon.
Osobiście wolę geometrycznie coś wyliczyć, w CADzie, niż cyferkami, bo za dużo błędów robię :-)
Stalowa szpachelka może w różny sposób się wygiąć pomiędzy dwoma punktami.
Takiej szerokości jakiej jest, jest sztywniejsza, niż jak bym cienki pasek z niej wyciął. Wycinałem nie dawno do czegoś innego.
Ten klin jest parabolą czy wycinkiem koła o dużym promieniu?
Klin to trójkąt równoramienny o wymiarach jak podałem wcześniej. Szpachelki możesz użyć w całości orientując ją wzdłuż ruchomej części napędu ale pamietając aby wypełnić czymś przestrzeń pod szpachelką - ja sugerowałem użycie poxipol-u szybkowiążącego.
Jak masz dostęp do maszyny CNC to możesz taki klin o długości 5 lub 10cm wyciąć np. z poliwęglanu o grubości 10mm. Powierzchnię klina stykającą się ze śrubą należałoby dobrze wyszlifować a najlepiej pokryć cienka blaszką stalową co zmniejszyłoby opory ruchu i zapewniło jego równomierność.
xooon
-
Twój napęd, Adm2, da się dość łatwo przybliżyć w ruchu do ruchu idealnego. Właśnie jego konstrukcja nadaje się do tego bardzo dobrze.
Mając 25mm posuwu śruby, z prędkością 1 obrót na minutę, masz zapewniony ruch w zakresie do 25 minut.
Oznacza to, że niebo wykona w tym czasie ruch kątowy:
15.041arcsec/sek *25min * 60sek/min=22562arcsec.
Jednocześnie, Twój napęd uniesie ruchomą część na wysokość 25mm tworząc trójkąt prostokątny o bokach przy kącie prostym: 25mm oraz 228.55mm.
W ten sposób ruchoma część zostanie rozwarta o kąt równy:
atan(25/228.55) co w mierze łukowej daje ok. 0.10895rad czyli 0.10895*2pi()/360=ok. 6.242 stopnia -> gdzie atan to funkcja arcus tangens
Przeliczając to na arcsek otrzymamy 6.242stopnia *3600arcsek/stopien = ok. 22473arcsek
Z porównania tej wartości z ruchem nieba otrzymamy 22473arcsek - 22561arcsek = ok. -89 arcsek
Tak więc napęd będzie się opóźniał w stosunku do nieba po 25 minutach o 89 arcsek. To oczywiste, bo ruchoma część koziołka oddalając się od części stałej popychana jest na coraz dłuższym ramieniu, które początkowo ma długość 228.5mm a po 25 minutach wydłuży się do:
sqrt(25^2+228.5^2)= ok. 229.9mm -> gdzie sqrt to pierwiastek kwadratowy a symbol ^ to podnoszenie do potęgi
Z wyliczeń wynika, że kąt 22562arcsek uzyskamy dla ruchu mikrometru nie o 25mm ale o 25.1mm.
Ponieważ wszystkie rozważania dotyczą kątów bliskich zera (nie więcj niż ok. 6 stopni) to można założyć, że długości łuków są mniej więcej proporcjonalne w sensie liniowym do katów rozwarcia (ścisłe rozwiązanie jest oczywiście możliwe, jest na pewno nieliniowe i nie wniesie istotnej poprawy dokładności ustaleń).
Oznacza to, że wydłużone ramię ruchome o 229.9mm-228.5mm=ok. 1.36mm powinno być uniesione o 0.1mm aby ruch był zbliżony do idealnego. I to są poszukiwane wymiary klina jakiego należałoby użyć do korekty ruchu.
Inaczej mówiąc, pod śrubą mikrometru należałoby dokładnie wstawić klin zwrócony szerszą stroną na zewnątrz o wymiarach 0.1mm/1.36mm. Oczywiście, taki klin trudno zrobić i idealnie podstawić pod śrubę ale z proporcji można określić, że podobny efekt da użycie klina o długości 50mm i wysokości ok. 3.7mm lub klina o długości 100mm i wysokości 7.3mm.
Powinieneś więc użyć swojej stalowej podkładki (usuwając plastikowy uchwyt) nie w poprzek ramienia ruchomego ale wzdłuż niego unosząc jej koniec na zewnątrz na odpowiednią wysokość - przelicz proporcjonalnie wysokość uniesienia w stosunku do długości jaką ma podkładka porównując z wyliczoną wyżej długością 50 lub 100mm. Należy przy tym zadbać aby przestrzeń pod stalową podkładką wypełnić czymś twardym (np. poxiipol 10 minut) aby nie uginała się pod ciężarem ruchomej części z zamocowanym sprzętem.
Drugą czynnością jaką można byłoby wykonać to zaokrąglenie końcówki śruby wypychającej ruchomą część koziołka - wtedy ruch napędu będzie bardziej jednoznaczny.
Wszystkie te wyliczenia są oparte na założeniu, że prędkość posuwu śruby jest dokładnie równa 1 obrót na minutę i jest stała. Jeśli jest inaczej to należałoby to uwzględnić w obliczeniach ale nie zmieni to zasadniczo wymiarów klina. Podadałem celowo skróty operacji matematycznych dla kogoś, kto chciałby powtórzyć obliczenia w arkuszu kalkulacyjnym (MS Office lub Open Office).
Nie mam teraz możliwości wykonania rysunku aby wyjaśnienie było bardziej zrozumiałe ale uzupełnię post o tą informację jak tylko będę mógł.
xooon
-
1
-
-
Spotkałem kiedyś w Lidlu lunetę do obserwacji naziemnej ze zmienną ogniskową. Czy ktoś ma jakieś doświadczenia z takim sprzętem do zastosowania w obserwacjach nieba?
xooon
-
Na razie próbuję się zorientować co może byc przydatne dla takiego początkujacego jak ja ale chętnie usłyszę coś więcej na temat Twojej oferty sidiouss :-)
Raz udało mi się spotkać w Lidlu lunetę do obserwacji naziemnych z regulowaną ogniskową (powiększeniem) ale kiedy za dwa dni dojrzałem do zakupu to lunety juz nie było :-(
Rozumiem, że zielony laser ma zastąpić oryginalny szukacz więc jak dziecko we mgle muszę zadać pytanie czy taki szukacz równiez zdarza się zakupić w Lidlu?
xooon
-
Gratuluję Behlur_Olderys zgrabnego wyprowadzenia zależności dla sterowania napędem z prostą śrubą!
Dołączam się do Twojej opinii, że łatwiej w tej sytuacji napisać kod uwzględniający malejącą prędkość - pod warunkiem, że zna się programowanie :-( .
Dla Adm2 mam jednak pytanie. Podaj proszę dokładniejsze dane swojej obecnej konstrukcji, chodzi o całkowity skok Twojej śruby (to chyba 25mm) oraz długość ramienia na jakim działa. Można będzie oszacować błąd na końcu ruchu - być może nie będzie on miał znaczenia przy odpowiedniej długości innych elementów napędu i przy określonej ogniskowej sprzętu jakiego używasz i problemu po prostu nie ma.
Zrób też proszę dokładniejsze zdjęcie sposobu w jaki obecnie śruba rozwiera nożyce napędu. Być może, da się w tym układzie wprowadzić korektę mechaniczną o jakiej piszesz. Twoje rysunki sugerują potencjalne sposoby ale pewnie sam się domyślasz, że wymaga to niestandardowej obróbki mechanicznej. Nie wykluczam jednak, że prosty klin wstawiony w odpowiednim miejscu pozwoli na istotne zmniejszenie błędów dla dłuższych czasów.
xooon
-
Moim zdaniem to 25mm z mikrometrem powinno działać nawet na prostym ramieniu bez udziwnień. A wydaje mi się, że parę linijek kodu w arduino łatwiej dopisać, niż frezować jakąś parabolę

-
Co z tego, że trzeba przewinąć napęd na początek - to dla tego typu urządzenia nie wada ale "feature" ;-). Mówiąc bardziej poważnie koziołek bez korekty wymaga uwzględnienia tego faktu w pracy.
Zastosowanie korekty prędkości uwalnia od konieczności częstego przewijania. Nie sądzę aby napęd działał dłużej jak 60 minut w jednym przebiegu więc rozważania w zakresie 3 godzin są chyba czysto teoretyczne.
Krok rzędu 5arcsec/sek jest zbyt duży aby przyjmować go w praktyce, proponuję trzymać się zasady znanej z kina: zmiany powinny być nie rzadsze niż kilkanaście razy w ciągu sekundy co usunie migotanie przy obserwacji wizualnej. Dlatego należałoby przyjmować krok nie większy niż 1arcsec/sek.
Wydaje się, że korekta prędkości nie musi być robiona częściej niż raz na kilka, kilkanaście sekund więc prędkość algorytmu dla funkcji kosinus nie ma znaczenia. I choć użycie szeregów Mclaurin-a do wyliczenia przybliżenia funkcji na pewno jest szybsze to i tak najwolniejsze współczesne mikrokontrolery są w stanie wyliczyć w ciągu sekundy kilkadziesiąt razy taką funkcję :-)
Uwagę na temat sztywności montażu traktuję jako ogólną, możliwą do zastosowania dla każdego montażu i jako taką nic nie wnoszącą do dyskusji bo koziołek osadzony na solidnym słupie będzie bardziej stabilny od fabrycznego montażu na kiepskim statywie.
xooon
[ Giełda ] Astrowalker
w Giełda: Archiwum
Opublikowano
Zobacz ogłoszenie
Astrowalker
Sprzedam napęd Astrowalker w jego najnowszej wersji.
Opis i budowa: https://www.astromaniak.pl/viewtopic.php?f=5&t=12347&hilit=astrowalker&start=75
Dokumentacja: http://lx-net.pl/aw/AW_man_v1-2.pdf
Kilka linków do zdjęć wykonanych za pomocą Astrowalker-a:
https://www.astromaniak.pl/viewtopic.php?f=4&t=17204&p=188864&hilit=astrowalker#p188864
https://www.astromaniak.pl/viewtopic.php?f=4&t=18093&p=196418&hilit=astrowalker#p196418
https://www.astromaniak.pl/viewtopic.php?f=4&t=16249&p=179273&hilit=astrowalker#p179273
https://www.astromaniak.pl/viewtopic.php?f=4&t=43781&p=407309&hilit=astrowalker#p407309
https://www.astromaniak.pl/viewtopic.php?f=4&t=19034&p=204883&hilit=astrowalker#p204883
W komplecie z urządzeniem znajduje się kabel zasilania oraz koło biegunowe, pomocne przy ustawianiu montażu na północ:
https://www.astromaniak.pl/viewtopic.php?f=5&t=38149&p=363110&hilit=astrowalker#p363110
Podstawowe parametry:
- dokładne śledzenie paralaktyczne w czasie 1h50' z możliwością wykonania dowolnej liczby przerw
- algorytm śledzenia kontrolowany za pomocą mikrokontrolera z dokładnością kilkudziesięciu sek. łuku w czasie pełnego przebiegu
- nośność kilka kg co pozwala na astrofotografię szerokopolową i/lub użycie przenośnych lunet i teleskopów typu "traveller"
- dostępne gwinty to 1/4 (redukcja) i 3/8", montaż można zamocować na typowym trójnogu fotograficznym
- gniazdo lunetki biegunowej gwintowane - typu eq3/5 - M28x0.5
- praca na półkuli północnej i południowej
- czas przewijania 11'
- zasilanie 12-14V 0.2A, praca na akumulatorze 1.3Ah w czasie ok. 8h
- możliwość użycia guide w osi Ra
- waga ok. 1kg
Urządzenie jest nowe, dostawa w pudełku ochronnym zawierającym napęd, redukcję 1/4", przewód zasilania oraz koło biegunowe.
Cena 699PLN + 16PLN za przesyłkę.
Kontakt wyłącznie mail-owy: xooon@o2.pl
xooon