

r.ziomber
-
Postów
2 750 -
Dołączył
-
Ostatnia wizyta
Typ zawartości
Profile
Forum
Blogi
Wydarzenia
Galeria
Pliki
Sklep
Articles
Market
Community Map
Odpowiedzi opublikowane przez r.ziomber
-
-
Sky Quality Meter mozna zrobic w miare latwo samemu.
Niestety moj jest jeszcze nieskalibrowany z fabrycznym modelem.
-
 1
1
-
 1
1
-
-
Gwiazda Barnarda to chyba jeden z najciekawszych obiektow do podjecia prob rejestracji paralaksy.
http://pergelator.blogspot.com/2013/07/barnards-star.html
-
3
-
-
Najwieksza bolaczka grup FB jest prawie zerowe indeksowanie przez Google. Sama wyszukiwarka FB jest tez mocno kulawa (czasem nawet nie znajduje potrzebnych materialow archiwalnych).
Zamieszczanie tam cenniejszych informacji jest nieodpowiednie, bo nie zapewnia dostepu do nich przez wyszukiwarke.
No i jest juz multum grup poswieconych astronomii, po co tworzyc kolejne?
-
1
-
-
W dniu 8.08.2018 o 00:31, Sebo_b napisał:
jeśli nie jest stale to DynDNSa.
Troche OT. Obsluga Dynamic DNS https://freedns.42.pl dla ESP8266 napisana w Arduino. Zastosowanie: ESP caly czas monitoruje obserwatorium i w razie potrzeby zdalnie uruchamia komputer czy Raspberry Pi. Przy okazji dba tez o uaktualnienie IP rekordu A naszej domeny.
#include <ESP8266HTTPClient.h> #include <ESP8266WiFi.h> #include <WiFiClientSecure.h> struct FreeDNSsettings { String domain; String subdomain; String newaddress; String user; String password; String ttl; } dnsset; void setup() { dnsset.domain = ""; dnsset.subdomain = ""; dnsset.user = ""; dnsset.password = ""; dnsset.ttl = "120"; Serial.begin(9600); //Serial connection WiFi.begin("Ssid", "password"); //WiFi connection while (WiFi.status() != WL_CONNECTED) { //Wait for the WiFI connection completion delay(500); Serial.println("Waiting for connection"); } } void loop() { if (WiFi.status() == WL_CONNECTED) { //Check WiFi connection status String myIP = publicIP(); String hostIP = gethostbyname(dnsset.subdomain + "." + dnsset.domain); if (myIP != hostIP) { dnsset.newaddress = myIP; updateDynDNS(); Serial.println(hostIP); } } else { Serial.println("Error in WiFi connection"); } delay(15 * 60 * 1000); } String publicIP() { String myIP; HTTPClient http; http.begin("http://ip.42.pl/raw"); //Specify request destination int httpCode = http.GET(); //Send the request if (httpCode > 0) { //Check the returning code myIP = http.getString(); //Get the request response payload } return myIP; } String gethostbyname(String host) { IPAddress ipAddress; WiFi.hostByName(host.c_str(), ipAddress); return String(ipAddress[0]) + String(".") + \ String(ipAddress[1]) + String(".") + \ String(ipAddress[2]) + String(".") + \ String(ipAddress[3]); } void updateDynDNS() { String xml = "<?xml version='1.0'?>\r\n" "<methodCall>\r\n" "<methodName>xname.updateArecord</methodName>\r\n" "<params>\r\n" "<param>\r\n" "<value><struct>\r\n" "<member>\r\n" "<name>name</name>\r\n" "<value><string>" + dnsset.subdomain + "</string></value>\r\n" "</member>\r\n" "<member>\r\n" "<name>zone</name>\r\n" "<value><string>" + dnsset.domain + "</string></value>\r\n" "</member>\r\n" "<member>\r\n" "<name>newaddress</name>\r\n" "<value><string>" + dnsset.newaddress + "</string></value>\r\n" "</member>\r\n" "<member>\r\n" "<name>oldaddress</name>\r\n" "<value><string>*</string></value>\r\n" "</member>\r\n" "<member>\r\n" "<name>updatereverse</name>\r\n" "<value><string>0</string></value>\r\n" "</member>\r\n" "<member>\r\n" "<name>user</name>\r\n" "<value><string>" + dnsset.user + "</string></value>\r\n" "</member>\r\n" "<member>\r\n" "<name>ttl</name>\r\n" "<value><string>" + dnsset.ttl + "</string></value>\r\n" "</member>\r\n" "<member>\r\n" "<name>password</name>\r\n" "<value><string>" + dnsset.password + "</string></value>\r\n" "</member>\r\n" "</struct></value>\r\n" "</param>\r\n" "</params>\r\n" "</methodCall>"; String http = "POST /xmlrpc.php HTTP/1.1\r\n" "Host: freedns.42.pl\r\n" "Accept-Encoding: gzip\r\n" "Content-Type: text/xml\r\n" "User-Agent: Python-xmlrpc/3.5\r\n" "Content-Length: " + String(xml.length()) + "\r\n" "\r\n"; xml = http + xml; WiFiClientSecure client; IPAddress ipAddress; WiFi.hostByName("freedns.42.pl", ipAddress); client.connect(ipAddress, 443); client.print(xml); }
-
W tym miejscu warto przypomniec miniserial sprzed 20. lat:
https://en.wikipedia.org/wiki/From_the_Earth_to_the_Moon_(miniseries)
-
-
Podobno gphoto2 obsluguje.
-
30 minut temu, M.M.M. napisał:
Możecie polecić jakiś hardware do tego ? Takiego gotowca-linka z allegro najlepiej potrzebuję
")
Raspberry Pi 3B+
https://indilib.org/support/tutorials/139-indi-library-on-raspberry-pi.html
https://indilib.org/devices/rasbperry-pi/astroberry-server.html
-
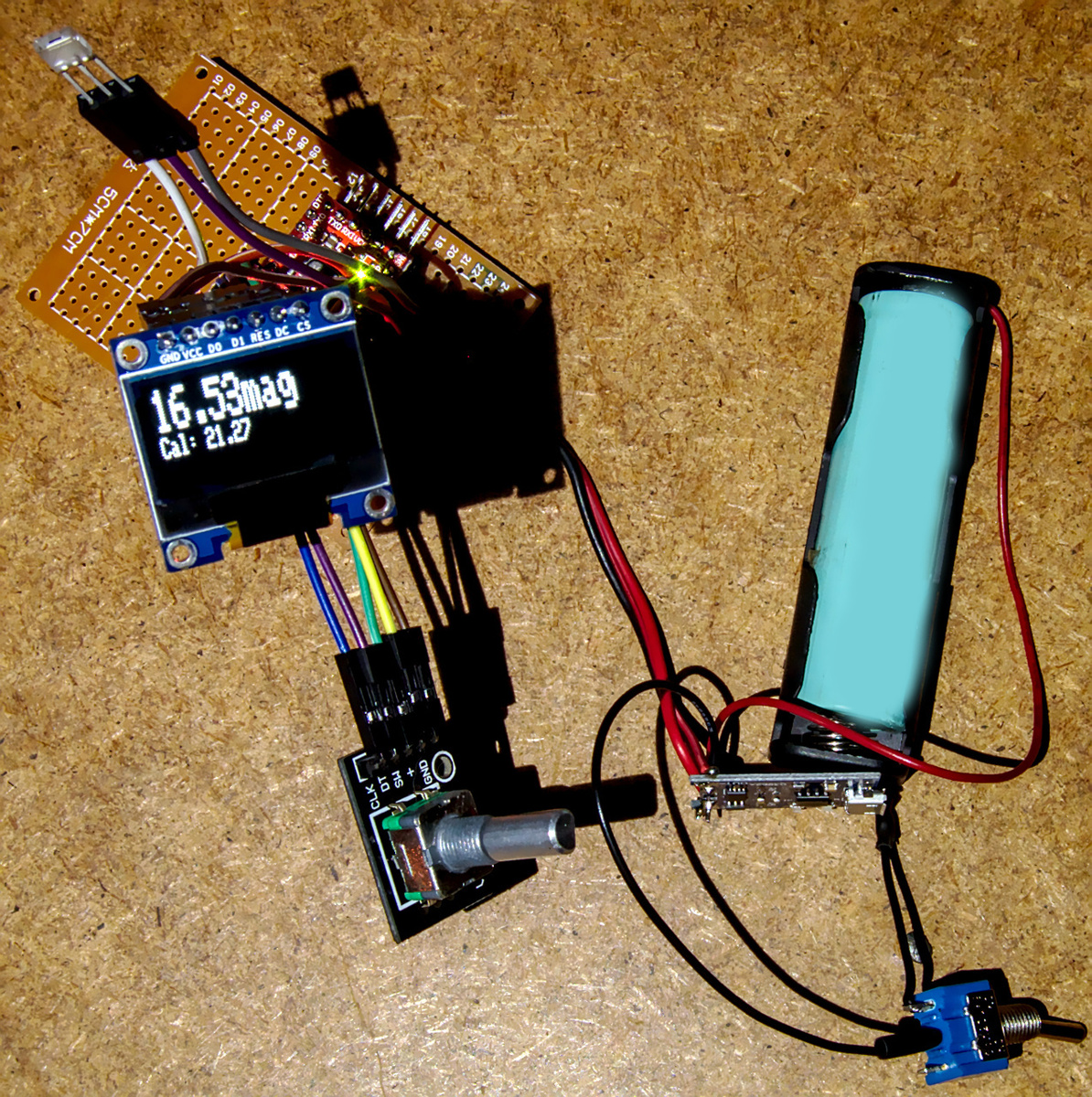
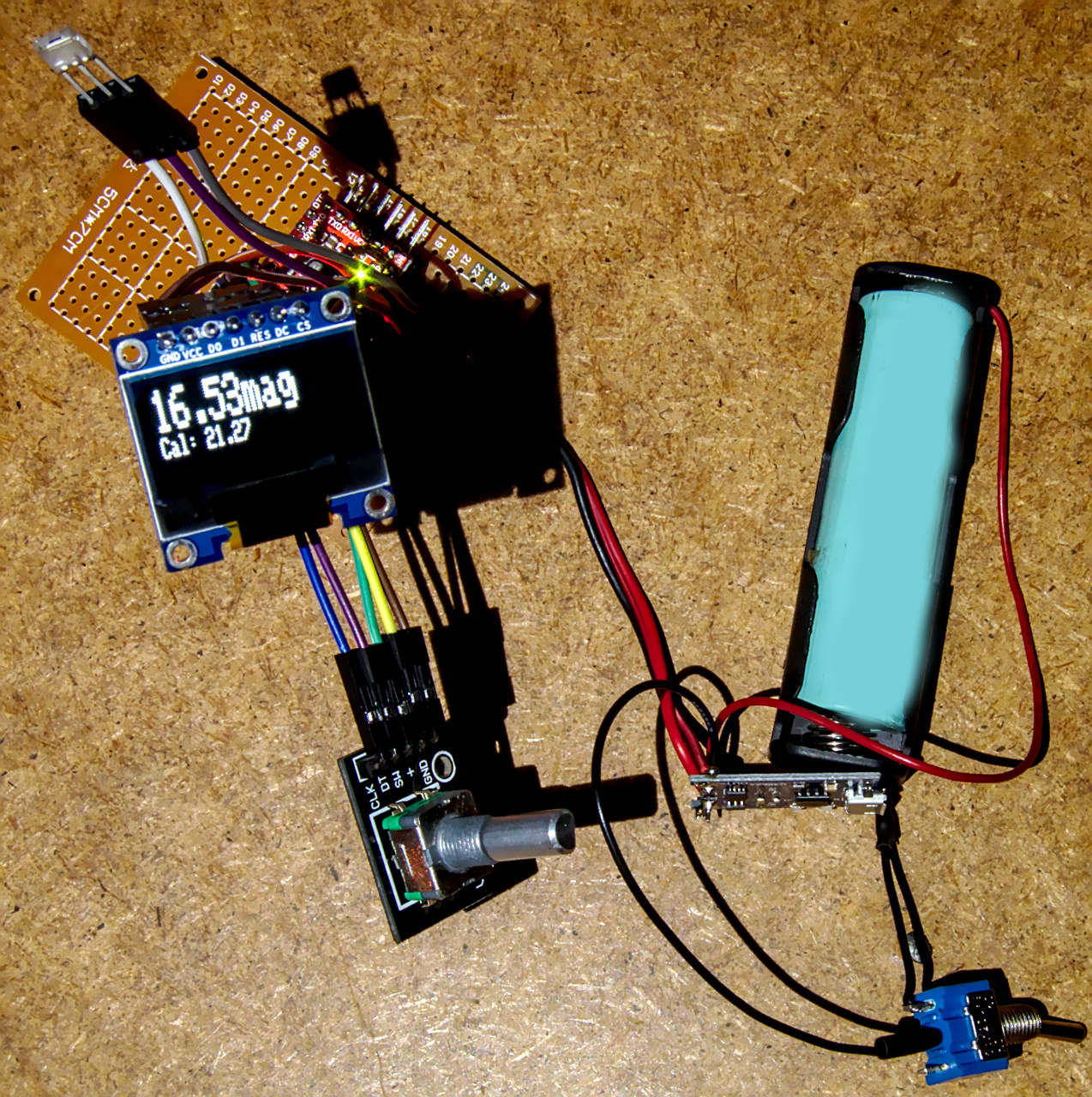
Mozesz tez samodzielnie zrobic bezprzewodowy (WiFi/Bluetooth) wezyk spustowy z interwalometrem ;-)
https://sourceforge.net/projects/arduino-dslr-remote-controller/
-
Gdybys uzywal Linuksa, polecilbym gphoto2 http://gphoto.org
Dokladniej libgphoto2 http://www.gphoto.org/proj/libgphoto2/
-
1
-
-
Rabka-Zdroj
Niestety jedyna znana mi ciemna lokalizacja sa popularne Kudlacze.


-
47 minut temu, Mik napisał:
firmware musi być jakiś konkretny czy dowolny znaleziony na sieci (we wpisie chyba zgubił się link)?
-
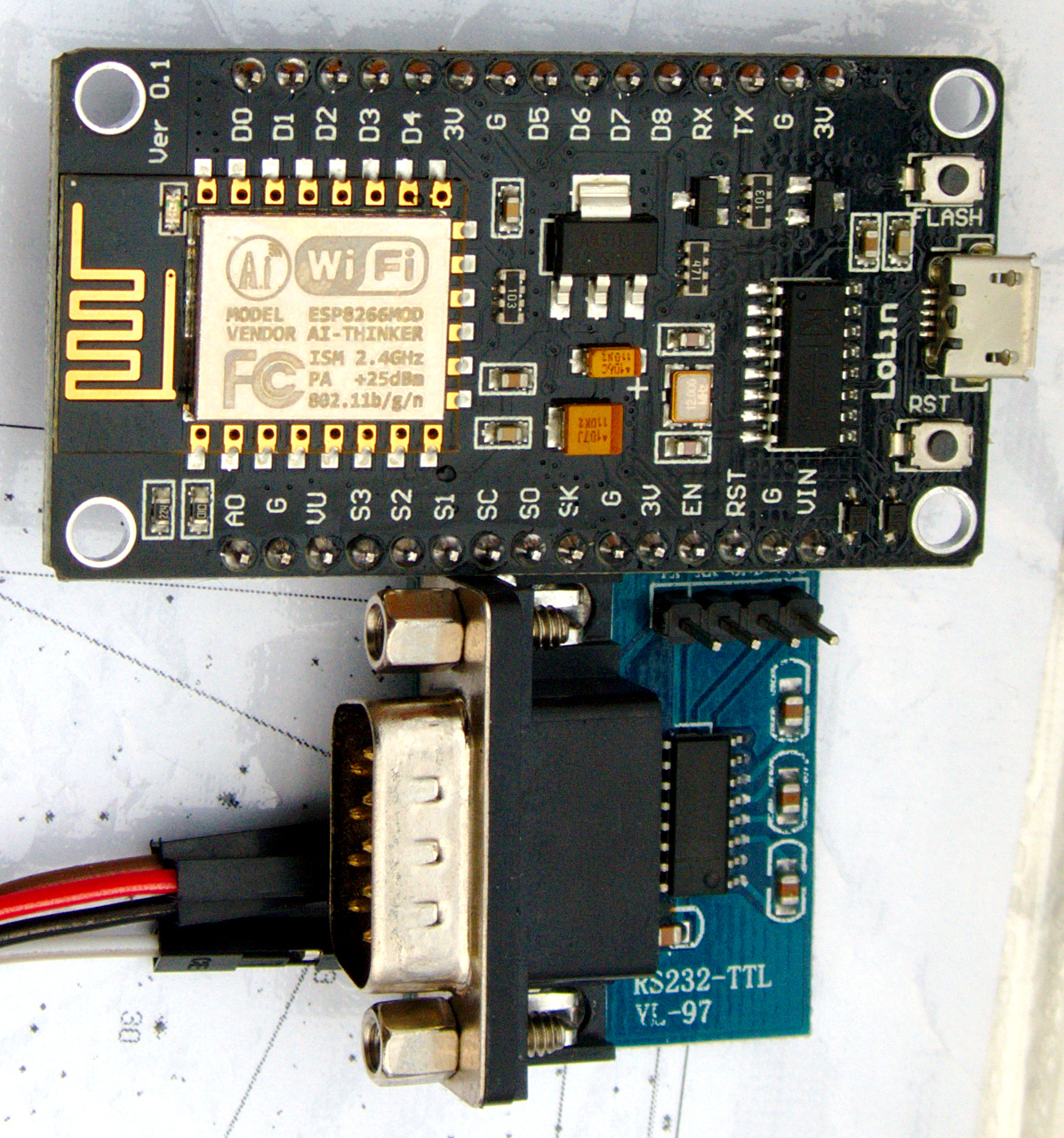
Tez mam RS-232 dostepne po WIFi, tylko w o wiele bardziej "mlotkowej" formie ;-)
http://techtinkering.com/2013/04/02/connecting-to-a-remote-serial-port-over-tcpip/
-
3
-
-
W dniu 25.08.2018 o 10:47, Behlur_Olderys napisał:
static_cast wygląda najbardziej elegancko, ale znowu - muszę sam się przekonać
Przy okazji millis() mozna sobie samemu "przekrecic". Dla ATmega328P dodaj do setup()
extern volatile unsigned long timer0_millis; noInterrupts(); timer0_millis += 4294963295; interrupts();
i bedziesz mial 4 s do przekroczenia zakresu unsigned long.
Przy okazji przydatne, jesli chcemy korygowac millis() o czas uspienia kontrolera i nie bawic sie w podmiane millis() na actualMillis() we wszystkich plikach.
unsigned long actualMillis() { return millis() + sleepCorrection; }
-
26 minut temu, Sebo_b napisał:
Pytanie jednak pozostaje - czy stabilizować/filtrować, czy nie i jeśli tak to jak.
-
https://arxiv.org/pdf/1610.00693.pdf
"These PSF models are created for telescope focus values in the range −10μm to +5μm at one micron increments, thus spanning the allowed range of telescope focus values. We then use the approximately ten well measured stars in each COSMOS field to pick the best-fit focus value for each field."
-
1
-
-
-
2 godziny temu, Behlur_Olderys napisał:
Z drugiej strony, jeśli aplikacja jest tak wyżyłowana performance'owo, że trzeba się martwić takimi rzeczami, to znak, że pora zastanowić się nad zmianą hardware'u
STM32!
A ESP32 jest dwurdzeniowe i mozna jeden rdzen poswiecic na timer.
https://groups.google.com/forum/#!topic/pl.misc.elektronika/K3eQYMWwdf4
-
2 godziny temu, Behlur_Olderys napisał:
Ogólnie - gdyby zaimplementować z boku gdzieś najprostszą protezę std::vector to mój "idealny" kod wyglądałby tak: (pseudo kod raczej)
Jest pare bibliotek. Przypuszczam jednak, ze beda miec istotny narzut, dlatego cuduje realloc z C. Przyznaje jednak, ze nie testowalem ich wplywu na wydajnosc.
https://github.com/maniacbug/StandardCplusplus
-
Czy moge prosic o weryfikacje? Zamiast
W dniu 23.08.2018 o 13:16, Sebo_b napisał:// constructor nextCall = now() + interval; //active loop if ( nextCall < now() ) { nextCall += interval; callWhatever(); }
proponuje
#include <limits.h> // constructor nextCall = now() + interval; //active loop if ( nextCall < now() && now() - nextCall < ULONG_MAX / 2 ) { nextCall += interval; callWhatever(); }
Powod: przedzial czasu obejmujacy przekroczenie zakresu zmiennej. now() bedzie wtedy olbrzymie a nextCall male. Warunek nextCall < now() zostanie wiec spelniony.
Standardowe rozwiazanie https://www.arduino.cc/en/Tutorial/BlinkWithoutDelay nie sprawia klopotow z overflow, ale kumuluje opoznienie kolejnych krokow.
-
1
-
-
Ale Arduino bez dodatkowych bibliotek nie obsluguje std::vector (w ogole STD) i stad takie mieszanie C++ z C.
https://github.com/maniacbug/StandardCplusplus
6 godzin temu, Behlur_Olderys napisał:Zasadniczo rozróżnianie tasków "zwykłych" i ET wydaje się również niepotrzebne - no, chyba że oszczędność pamięci.
Zadanie "doczesne" przechowuje jedynie informacje o interwale. Wykonywane kilka razy dodatkowo musi miec informacje o ilosci cykli i "poczekalni" przed pierwszym wykonaniem.
6 godzin temu, Behlur_Olderys napisał:Dlatego proszę, nie traktuj tego jako krytykę, a raczej jako analizę porównawczą
Ale ja oczekuje krytyki! Chce sie uczyc od zawodowych programistow i doskonalic swoje znikome umiejetnosci.
Jesli tylko masz czas napisac, z checia wyslucham, co zrobilem zle!
Mam jeszcze glupi pomysl, o ktory byc moze rozbuduje swoj timer. Terminarz oparty na... delay(). No dobra, nie na delay(), a na uspijMikrokontroler(), ale w zewnetrznym zachowaniu to prawie to samo
Po prostu znajde najblizsze zadanie w tabelicach time i timeET i do tego czasu uspie mikrokontroler. Bedzie to dodatkowa opcja, bo oczywiscie nienadajaca sie do kazdego projektu.
PS. Ktos kiedys powiedzial, ze na delay() nie da sie zrobic wielozadaniowosci. Dlatego tez chce ja zrobic

-
Poniewaz powyzszy kod wykorzystuje w paru swoich projektach (rowniez astronomicznych), zrobilem z tego biblioteke dla Arduino.
http://sourceforge.net/projects/arduino-timer-library-rztimer
-
Na poczatku swojej przygody z Arduino napisalem cos takiego. Przygotowane z mysla o interwalometrze dla lustrzanki. Zadania typu "wykonaj 10 zdjec z interwalem 2s, poczekaj 12s przed startem".
Uzycie:
- co 2000 ms wykonaj funkcje blinkLEDtimer.addEverytime(2000, blinkLED);
- wykonaj dwa razy funkcje itWorks co 2000 ms, poczekaj 300ms przed pierwszym wykonaniem
timer.addTask(300, 2, 2000, itWorks);class RZTimer { public: size_t tasks, tasksET; typedef void( * makeThisT )(); typedef struct { unsigned long time; unsigned int interval, iterations, iterationsDone; makeThisT makeThis; } parameter; parameter *parameters; typedef struct { unsigned long timeET; unsigned int intervalET; makeThisT makeThisET; } parameterET; parameterET *parametersET; void run(); size_t addTask(unsigned int, unsigned int, unsigned int, void (*makeT)()); void removeTask(size_t); size_t addEverytime(unsigned int, void (*makeT)()); void removeEverytime(size_t); size_t findTaskID(void (*makeT)()); size_t findTaskIDEverytime(void (*makeT)()); }; size_t RZTimer::addTask(unsigned int _wait, unsigned int _iterations, unsigned int _interval, void (*makeT)()) { tasks++; parameters = (parameter*) realloc(parameters, tasks * sizeof(parameter)); parameters[tasks - 1].time = millis() + _wait; parameters[tasks - 1].interval = _interval; parameters[tasks - 1].iterations = _iterations; parameters[tasks - 1].iterationsDone = 0; parameters[tasks - 1].makeThis = makeT; if (parameters[tasks - 1].iterations == 0) { parameters[tasks - 1].iterations = 1; } return tasks - 1; } size_t RZTimer::addEverytime(unsigned int _interval, void (*makeT)()) { tasksET++; parametersET = (parameterET*) realloc(parametersET, tasksET * sizeof(parameterET)); parametersET[tasksET - 1].timeET = millis(); parametersET[tasksET - 1].intervalET = _interval; parametersET[tasksET - 1].makeThisET = makeT; //makeT(); return tasksET - 1; } void RZTimer::run() { for (size_t i = 0; i < tasks; i++) { if (parameters[i].iterations) { if (static_cast<long>(millis() - parameters[i].time) >= 0) { parameters[i].time += parameters[i].interval; parameters[i].makeThis(); parameters[i].iterationsDone = parameters[i].iterationsDone + 1; if (parameters[i].iterationsDone >= parameters[i].iterations) { removeTask(i); } } } } for (size_t i = 0; i < tasksET; i++) { if (static_cast<long>(millis() - parametersET[i].timeET) >= 0) { parametersET[i].timeET += parametersET[i].intervalET; parametersET[i].makeThisET(); } } } void RZTimer::removeTask(size_t _task) { if (_task < tasks) { for (size_t i = _task; i < tasks - 1; i++) { parameters[i] = parameters[i + 1]; } tasks--; parameters = (parameter*) realloc(parameters, tasks * sizeof(parameter)); } } void RZTimer::removeEverytime(size_t _task) { if (_task < tasksET) { for (size_t i = _task; i < tasksET - 1; i++) { parametersET[i] = parametersET[i + 1]; } tasksET--; parametersET = (parameterET*) realloc(parametersET, tasksET * sizeof(parameterET)); } } size_t RZTimer::findTaskID(void (*makeT)()) { for (size_t i = 0; i < tasks; i++) { if (parameters[i].makeThis == makeT) { return i; } } return (size_t) ~0; } size_t RZTimer::findTaskIDEverytime(void (*makeT)()) { for (size_t i = 0; i < tasksET; i++) { if (parametersET[i].makeThisET == makeT) { return i; } } return (size_t) ~0; } RZTimer timer; void blinkLED(); void setup() { Serial.begin(9600); pinMode(LED_BUILTIN, OUTPUT); timer.addEverytime(2000, blinkLED); auto itWorks = []()->void {Serial.print("It Works! "); Serial.print(millis()); Serial.println(" ms");}; timer.addTask(300, 2, 2000, itWorks); } void loop() { timer.run(); } void blinkLED() { Serial.print("ON "); Serial.print(millis()); Serial.println(" ms"); digitalWrite(LED_BUILTIN, HIGH); auto blinkLEDoff = []()->void {digitalWrite(LED_BUILTIN, LOW); Serial.print("OFF "); Serial.print(millis()); Serial.println(" ms");}; timer.addTask(1000, 1, 0, blinkLEDoff); }
-
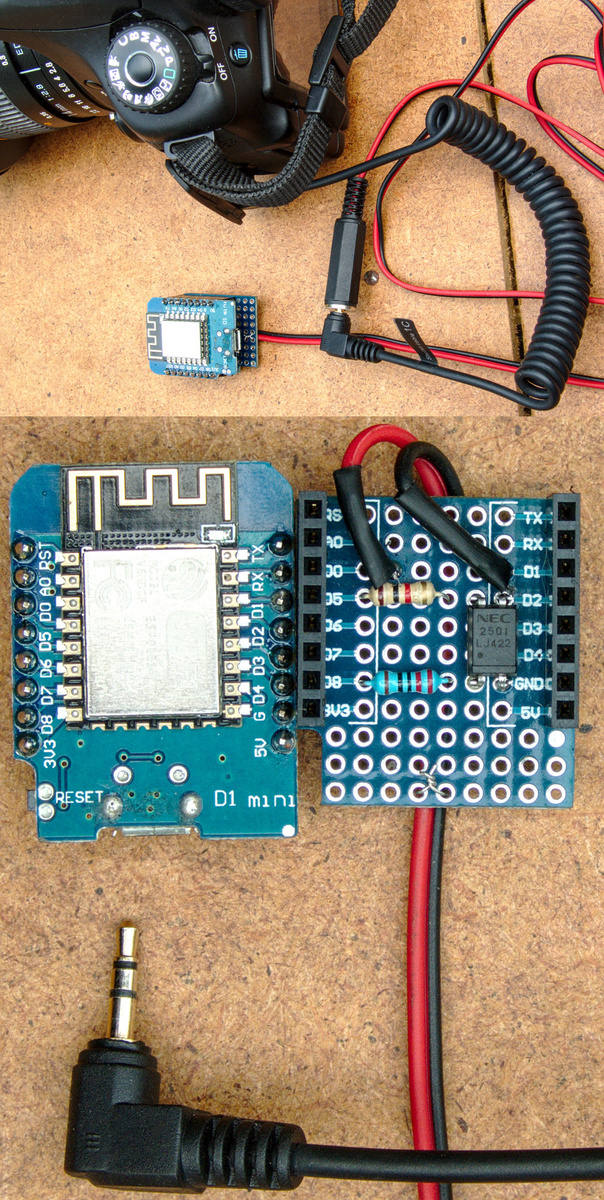
Is ESP8266 I/O really 5V tolerant?
Dla sygnalow cyfrowych mozna wstawic szeregowo rezystor kilku kΩ pomiedzy ESP a Arduino 5V.
Bardzo polecam jednak programowac samo ESP w Arduino i wykorzystac je w roli mikrokontrolera.
https://sourceforge.net/projects/arduino-dslr-remote-controller/




Teleskop SkyLux EL 70/700
w Testy i Recenzje
Opublikowano · Edytowane przez r.ziomber
Odleglosc s = 300m
srednica przestrzeliny l = 0.00556m
srednica katowa = 2*arctan(0.5*l/s) = 2*arctan(0.5*0.00556/300) = 0.001° = 3.8"
https://pl.wikipedia.org/wiki/Kryterium_Rayleigha
r = 143/70 = 2"
Hipotetycznie sie da. Pewnie jednak wiekszy teleskop sprawi sie do tego celu o wiele lepiej.