r.ziomber
-
Postów
2 750 -
Dołączył
-
Ostatnia wizyta
1 obserwujący

Ostatnie wizyty










Osiągnięcia r.ziomber
466
Reputacja
-

Sztuczna Inteligencja w służbie astronomii ;-) Czyli czat GPT w praktyce
r.ziomber odpowiedział(a) na zdzichu temat w Książki, aplikacje, media
Wg. Zdradzieckich profili, Ukraina powinna natychmiast poddać się bez walki. Oni są całkiem nieźli w manipulacji. Niektóre postaci całkiem nieźle znają się na psychologii. Potrafią postronnych, nieopłacanych przez siebie ludzi zamienić w bezmózgich zombie, z własnej woli szerzących propagandę Gremlina. Skutecznie nawołując ich do buntu i destabilizacji społeczeństwa. Jeżeli Twój kolega z pracy życzy zwycięstwa Ukrainie, nie uznałbym go za antyukraińskiego. Choć zdrowy rozsądek podpowiada popierać pana Prezia do czasu zakończenia wojny. W tym momencie państwo powinno być jak najbardziej zjednoczone w osiągnięciu wspólnego celu. No chyba, że Zełenski istotnie opóźnia zakończenie wojny, z jedynym rozsądnym skutkiem (kapitulają Rosji, choć ta pewnie nie odpuści bez jakiegoś trofeum A najlepiej zapaścią gospodarczą Rosji i rozpadem, tak by nie mogła odbudowywać swoich możliwości i za X lat grozić wybuchem kolejnej wojny. By nie odbiegać od wątku AI, które pewnie też przy okazji bierze udział w zmasowanej propagandzie ZSRR: Introducing Meta Llama 3: The most capable openly available LLM to date PS. Nie kontynujmy może wątku Ukrainy, bo znając życie zlecą się na to forum opłacane trolle i zaczną regularne zalewanie swoją wybitną zawartością. A może ktoś powie coś za dużo i będzie mu grozić przypadkowy zawał serca. -
Sztuczna Inteligencja w służbie astronomii ;-) Czyli czat GPT w praktyce
r.ziomber odpowiedział(a) na zdzichu temat w Książki, aplikacje, media
Płaska Ziemia jest bardzo natarczywie narzucana przez rosyjską propagandę. Prosty człowiek znajduje przekonujące go dowody, uzyskuje dostęp do wiedzy tajemnej, czuje się dowartościowany, wyjątkowy. Wchodzi w bańkę informacyjną, zaczyna śledzić profile. Nagle staje się tubą propagandową Sputnik News. Wystarczy spojrzeć na konta w serwisach społecznościowych, by odkryć, że wszyscy agresywni naganiacze Plackoziemia nagle stali się antyukraińscy i generalnie promują ten sam przekaz, w różnych dziedzinach życia. Zawsze zgodny z interesem ZSRR. Więc tak. Płaska Ziemia ma za sobą wielkie poparcie i pieniądze. Z innej beczki. Warto mieć na uwadze różne modele, gdyż trenowane są na różnych danych. Czasem te mniej znane i "ogarnięte" zapewniają lepsze rezultaty w pewnych niszowych kwestiach. https://claude.ai https://gemini.google.com Za darmo dwie rozmowy z GPT 4 na dzien https://www.popai.pro W ustawieniach trzeba wlaczyc GPT 4 https://chat.clarin-pl.eu/pl/chat https://poe.com https://www.perplexity.ai https://chat.reka.ai/chat https://app.corcel.io/chat https://huggingface.co/chat/ https://chat.lmsys.org https://chat.mistral.ai/chat https://www.phind.com https://openrouter.ai https://api.together.xyz https://app.anakin.ai https://console.groq.com/playground- 230 odpowiedzi
-
- 2
-

-
- sztuczna inteligencja
- czat gpt
- (i 1 więcej)
-
Ender-3 V3 SE z Aliexpress. Z zupelnie innej beczki https://www.thingiverse.com/thing:4705423
-
Zakrycie (obrączkowe) Betelgezy przez planetoidę Leona - relacja z placu boju
r.ziomber odpowiedział(a) na Marcin_G temat w Zjawiska zakryciowe
Kilka dronów z rozwieszoną siatką. "Niedokładności w prowadzeniu się" zestawu sprawiłyby, że takie zakrycie byłoby niezmiernie krótkie. BTW, http://www.icra.it/gerbertus/2023/Gerb-19-2023-Sigismondi-Beteleguse-361-366.pdf -
EOS-T2 czyli podłączmy obiektyw do kamerki astro - jest małe ale gdy obiektyw ma AF
r.ziomber odpowiedział(a) na bacHor pytanie w Pierwsze Kroki: Sprzęt
https://indilib.org/media/kunena/attachments/3728/ascom_efEN.pdf https://github.com/howiemnet/h-moco-LENS-Arduino https://web.media.mit.edu/~bandy/invariant/move_lens.pdf https://gist.github.com/marcan/858c242db2fc595da1e0bb70a05192fc Parę ciekawych rzeczy znajdziesz w wątku https://pickandplace.wordpress.com/2011/10/05/canon-ef-s-protocol-and-electronic-follow-focus/ -
Jak nie złapałem impaktu na Jowiszu
r.ziomber odpowiedział(a) na WielkiAtraktor temat w Planety i Księżyc
Znowu ktoś pokiereszował mordę Jowiszowi. https://twitter.com/kunihiko_suzuki/status/1724974223603782000 -
Zakrycie Wenus przez Księżyc - 9/11/2023
r.ziomber odpowiedział(a) na Milena Niemczyk temat w Zjawiska zakryciowe
Rabka-Zdrój. Niestety cirrusy nie pozwoliły na więcej. -
RPi Ubuntu zapewnić gracefully shutdown
r.ziomber odpowiedział(a) na Behlur_Olderys pytanie w Pytania: Różne
Nie testowane. trochę pseudokod C++. Pamiętajcie, by nie przekroczyć 3.3V na GPIO Raspberry Pi. https://abyz.me.uk/rpi/pigpio/cif.html #include <iostream> #include <pigpio.h> #include <chrono> #include <thread> #define PIN 7 int main () { if (gpioInitialise () < 0) { std::cerr << "Failed to initialize pigpio\n"; return 1; } gpioSetMode (PIN, PI_INPUT); //gpioSetPullUpDown(PIN, PI_PUD_UP); auto lastTimePower = std::chrono::high_resolution_clock::now (); while (1) { if (gpioRead (PIN) == 1) lastTimePower = std::chrono::high_resolution_clock::now (); else { auto now = std::chrono::high_resolution_clock::now (); auto elapsed = std::chrono::duration_cast <std::chrono::milliseconds> (now - lastTimePower).count (); if (elapsed >= 5000) { system ("sudo shutdown -h now"); //jesli nie ubije procesu przed kolejnym przejesciem petli std::this_thread::sleep_for (std::chrono::milliseconds (10000)); } } std::this_thread::sleep_for (std::chrono::milliseconds (100)); } gpioTerminate (); return 0; } Całkiem prawdopodobne, że https://pl.wikibooks.org/wiki/C/time będzie wydajniejsze, nie mówiąc o prostszym użyciu od std::chrono::high_resolution_clock::now (); W końcu nie potrzebujemy milisekundowej dokładności. https://pl.wikibooks.org/wiki/C/clock - to też warte rozważenia, bo po aktualizacji czasu systemowego z NTP nagle Unix time przeskoczy o 50 lat. O ile pomiar nie wykaże stanu niskiego if (gpioRead (PIN) == 1), nie powinno to wpłynąć na działanie programu. W przeciwnym razie może nie odczekać zakładanego minimalnego okresu braku zasilania if (elapsed >= 5000). -
RPi Ubuntu zapewnić gracefully shutdown
r.ziomber odpowiedział(a) na Behlur_Olderys pytanie w Pytania: Różne
Lub https://learn.adafruit.com/read-only-raspberry-pi/overview + zewnetrzny dysk na dane. Nadal jednak programowo sprawdzałbym stan zasilania i wyłączał RPi. -
Szukaj pod nazwą http://www.gphoto.org bo libgphoto2 to biblioteka wykorzystywana przez terminalową aplikację gphoto2, jak i inne. https://docs.darktable.org/usermanual/3.8/en/tethering/overview/
-
Zasilanie grzałki - schemat połączenia
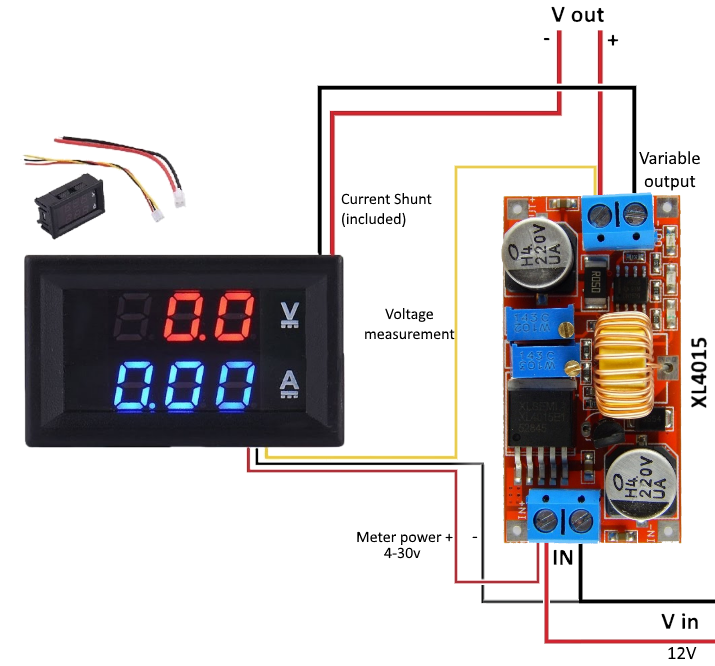
r.ziomber odpowiedział(a) na sebol pytanie w Pierwsze Kroki: Sprzęt
Te mierniki mają na ogół dwa zestawy przewodów. Trzy cienkie do zasilania i pomiaru napięcia (czarny - GND, czerwony - VCC zasilania miernika, żółty - "sonda" do pomiaru napięcia. Gorzej z grubymi przewodami, którymi mierzy się szeregowo natężenie prądu. Tu jest większa szansa na uszkodzenie. Na pewno nigdy nie należy tych grubych przewodów bezpośrednio podłączać do - i + zasilania! Na ogół czarny, gruby idzie do GND zasilania, czerwony (ten kolor jest nieco mylący - to nadal GND!) do GND odbiornika. Wypadałoby jednak mieć schemat pod konkretny model. Są czasem w ofertach na Aliexpress.
-
http://www.gphoto.org/proj/libgphoto2/support.php
-
DIY - Kamera All Sky na bazie ZWO
r.ziomber odpowiedział(a) na Adam_Jesion temat w ATM, DIY, Arduino
Nie wiem, jak dodaje się SQM do obrazu w gotowych projektach AllSky, ale do pomiaru wystarczy TSL237 light-to-frequency converter. Przypuszczam, że pomiar częstotliwości bezpośrednio z Raspberry, bez udziału mikrokontrolera nie jest zbyt dokładny. Na szczęście przy nocnym niebie uzyskamy kilka(naście) herców z tego czujnika, co sprawi mniej problemów z pomiarem, niż wyższe częstotliwości. https://abyz.me.uk/rpi/pigpio/examples.html Znając częstotliwość, dalej korzystamy z https://pl.wikipedia.org/wiki/Czynnik_Pogsona i dobranej stałej kalibracyjej. W swoim mierniku liczę medianę z wielu pomiarów. Jeżeli nasz gotowy projekt AllSky wyświetla stronę WWW, wystarczy do kodu źródłowego dodać kod pobierający JSON ze skryptu odpalajacego stronę www na innym porcie. https://developer.mozilla.org/en-US/docs/Web/API/Fetch_API https://www.w3schools.com/js/js_timing.asp https://www.w3schools.com/js/js_json_parse.asp
-
-
https://www.indilib.org/about/ekos.html https://www.indilib.org/about/ekos/setup.html