

JaLe
-
Postów
6 823 -
Dołączył
-
Ostatnia wizyta
-
Wygrane w rankingu
3
Typ zawartości
Profile
Forum
Blogi
Wydarzenia
Galeria
Pliki
Sklep
Articles
Market
Community Map
Odpowiedzi opublikowane przez JaLe
-
-
Każda metoda która działa i jest skuteczna: jest dobra - i laptop i ST4, każde z tych rozwiązań ma też swoje zalety i wady.
Co do rury na guider to opcja z długim newtonem jest bezsensu - cieżko to zamocować tak żeby całość była sztywna, a to jest bezwględnie wymagane przy guide. Ja używam 80/400+barlow2x. Całość jest regulowana w razie problemów z gwiazdką. Do ogniskowej do 500mm jade bez barlowa, przy 1000mm z barlowem. ST4 wręcz wymaga jednopixelowych gwiazdek, kamerka + softy potrzebują nieco jaśniejszych dla efektywnego guide. Do tego dochodzi seeing, możliwy krótki czas bez korekt - żeby całość nie szarpała i jeszcze pół miliona innych czynników o których każdy który zaczyna tą zabawę dowie się w przeciągu kilku pierwszych sesji...
I znowu dorzucę swoje 3 grosze.
Zgadzam się kolega Kałużnym, że każda metoda ma swoje zalety i wady. w Tej chwili rozpracowuje/dopracowuje rozwiązanie, które już opisuje w kilku wątkach. Zaletą na pewno jest cena, bo mam oczywiście laptopa, Vestę i konwerter.
Dzięki czemu mam sterowanie GoTo i Guid z komputera. Wizualizacja GoTo - mapki w CdC, guidowanie w programie GuideMaster.
Czyli oszczędzam na pilocie SynScan 1400,- + ST4 2000,- razem 3400,-
Ale należy mieć odpowiedni Laptop wg mnie za minimum 1000,- + konwerter. Teraz zależy sobie odpowiedzieć na pytanie jak takie rozwiązanie będzie skuteczne w naszych rękach.
-
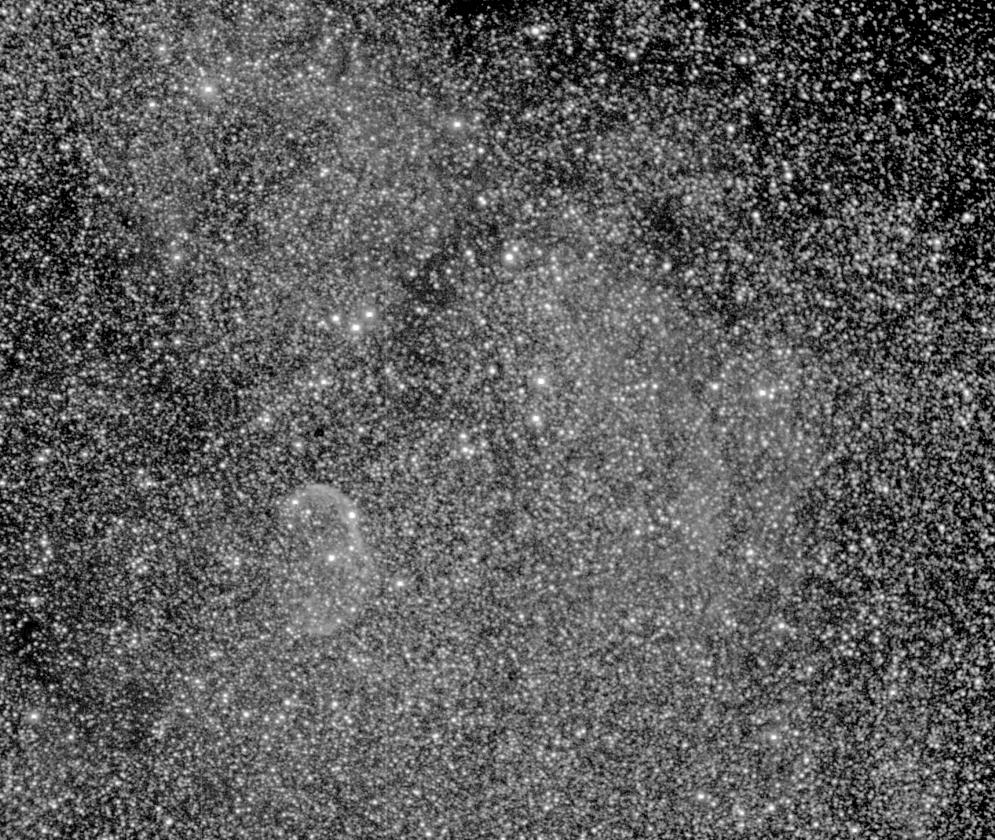
Ja dodam miej więcej te okolice tylko, że bez H-alfa

1x420" 5x300" 2x240"
-
Takie duże pole , aż się prosi o to, by było w kolorkach

-
Obniżam cenę na 700,-
-
Dzięki JaLe
Jak byś mógł to wrzuć jakieś fotki tego monta bo to co necie to trochę mało,a mam podobny dylemat co Adam(HEQ5 vel EQ60)
Pozdrawiam ANVA

Porównanie:

więcej:
-
Przepraszam że się wtrącę ale jak ty JaLe mogłeś biegać z tym EQ5 pod pełnym obciążeniem,ja mam Celestronowe CG5(montaż od C10N) na rurach 2" i z dwoma przeciw wagami to jest co dygnąć( a raczej też nie jestem cherlakiem),wiec proszę wyjaśnij w czym różnią się te dwa montaże od siebie.
Pozdro ANVA
ps Montaż z trójnogiem ok 10kg
przeciw wagi 2x5,1kg
to w sumie ponad 20kg+ coś do zawieszenia na nim.
Napisz ile waży samo EQ6(statyw+montaż)
Z tym bieganiem to była przenośnia, ale uwierz mi że EQ5 to naprawdę leciutki mobilny montaż w porównaniu z EQ6.
Głowica EQ6 z tripodem to około 20kg bez przeciwwag
 , więcej więc nie można przenosić bez narażenia się na utratę stabilności - bo liczy się też rozłożenie ciężaru
, więcej więc nie można przenosić bez narażenia się na utratę stabilności - bo liczy się też rozłożenie ciężaru -
Ja powiem jeszcze raz, że gdy przenoszę EQ 6 to robię to bez przeciwwagi i 80ED. W przypadku EQ5 mogłem podnieś pełne obciążenie bez problemu i biegać "gdzie popadnie", teraz cały sprzęt rozkładam na kilka razy.
EQ6 trochę waży i to nie przelewki, mówię to mimo tego że mam troszeczkę pary w rękach
, ale odległość i mnogośc elementów do zainstalowania robi swoje -
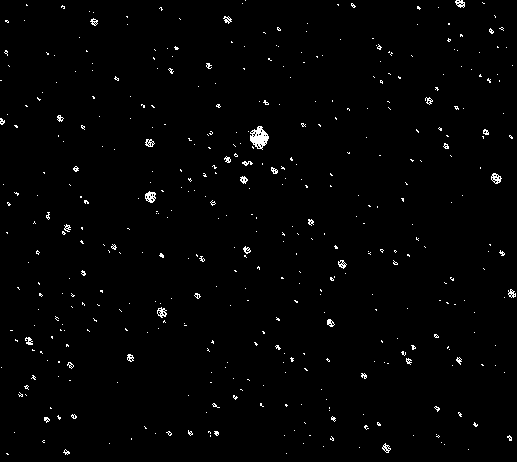
Mnie też chmury przeszkadzały w obserwacjach zjawiska.
Na otarcie łez zobaczyłem tylko taki widok:

-
A tak z czysto próżnej ciekawości (bo zakupy nowego sprzętu planuję za rok-półtora) spytam, jak sądzisz, jaka jest granica nośności EQ 6 do sensownej zabawy w planety, Słońce i satelity z okazjonalnymi pstrykami różnych DS'owych brzydot? Oczywiście nie chodzi o zabawy wizualne, ale zabawy z pikselami w tle.
Pytam, bo np niejaki
Orion stawia swoje SCT na EQ6, a taki imć Celestron na montażu CGE (zupełnie nie potrafię znaleźć porównania dla tego montażu, ale chyba jest to coś klasy EQ6). I oczywiście producenci zachwalają te montaże jako niebywale stabilne i przygotowane dla wymagających astrofotografów (a ja im i tak nie wierzę...). W tej chwili buduję 11" Newtona o konstrukcji kratownicowej i z tego co widzę powinie ważyć wraz z kamerką max 9 kg + przeciwwaga 80ED + dociążenie 9Kg co daje nam 18 kg.
Opieram się na prostej zależności - skoro producent daje 10kg przeciwwag to nie powinniśmy przekraczać ogólnego ciężaru 20 kg
-
może lepiej napisz jak i czym podłaczyłeś komputer do montażu
ten pilot (Syntrek) ma jakieś gniazdo do komunikacji z komputerem?
Oczywiście część tajemnicy kryje się w konwerterze (widocznym na zdjęciu), bo właśnie dzięki niemu komputer komunikuje się z montażem

ps. zapomniałem dopisać, że pilot jak i kabelek do połączenia z ST4 i sam ST 4 są zbyteczne
-
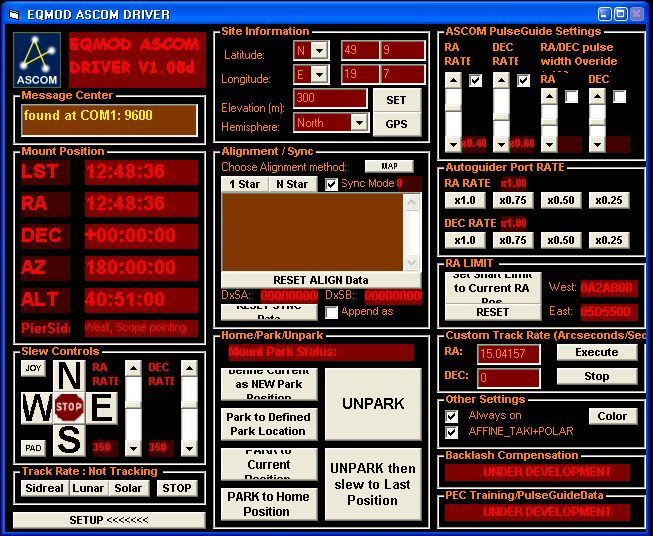
Ponieważ już kilka osób dopytywało się mnie o działanie sterowania z komputera, pokaże pełny panel kontrolny:
-
Ponieważ posiadam EQ 6 poczułem się wezwany do tablicy
Powiem tak, wziąłem EQ6 przede wszystkim ze względu na nośność.
EQ 6 to jednak spory ciężar (ponad 20 kg) i uwierz mi jest co wynosić.
-
Może dopiszę, bo nie wszyscy wiedzą, że GOTO jest adresowane przede wszystkim do montaży EQ5 i SVP.
-
Nie no efektywność H- alfa mnie osłabia

Znowu muszę sobie powiedzieć - Chcę takiego
-
stakuje oryginał + lineart najaśniejszych partii oryginału w kolorze tła oryginału + symulacja klatki bez blumingu na obowiażkowo ciemnym tle
 +
+ +
+
wynik staku mediana

jedyny problem to że gwiazdy bez blumingu mogą byc duzo mniejsze i nie starczać na pokrycie dziur.
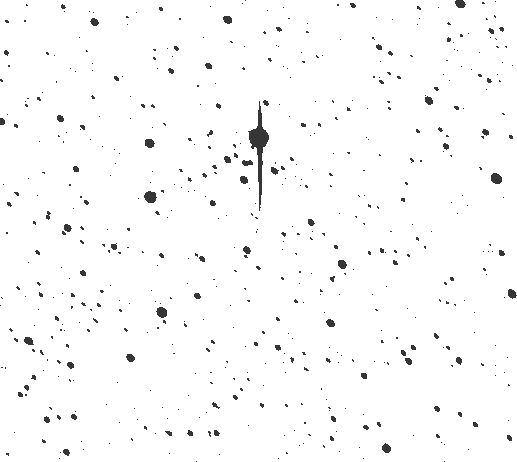
Próbowałem McArti postępować zgodnie z Twoimi radami. Wykonałem więc kilka ekspozycji tylko z obróconą o 180* kamerą. Efekt jest następujący:
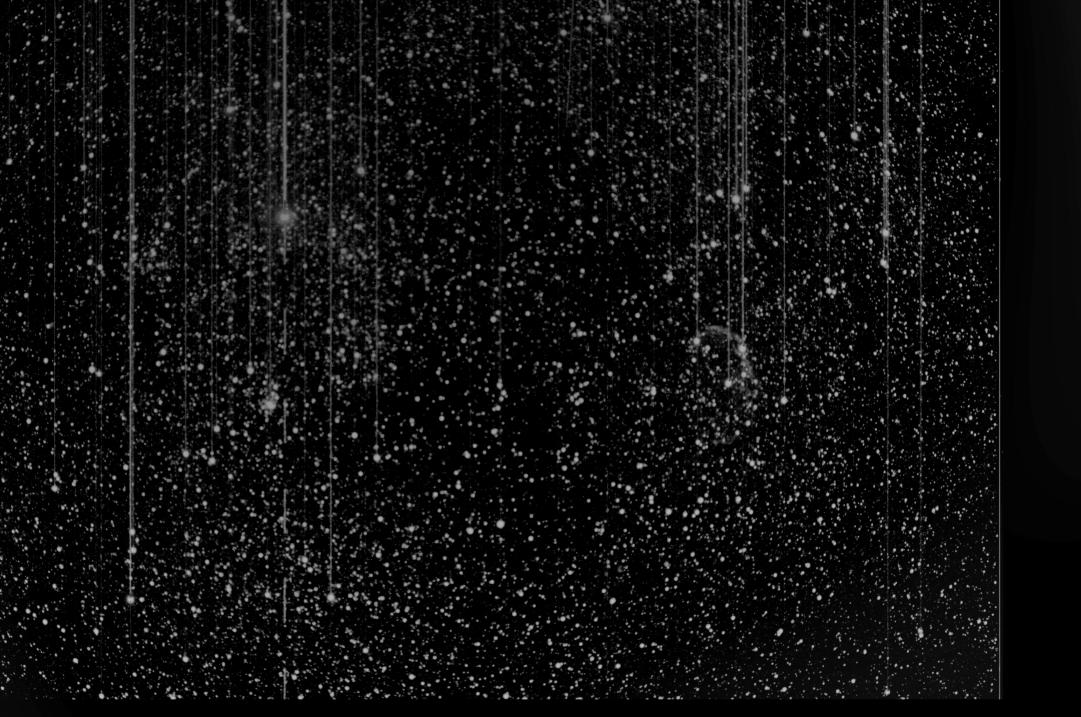
-
Chyba totalnie wszystko pokręciłeś. Jak może być lunetka zasłonięta przez obudowę

I co to znaczy ustawienie na zero ?
Może powiem tak łopatologicznie: w wale na końcówce którego masz zamocowany teleskop jest otwór, musisz tak pokręcić tym wałem, żeby zobaczyć przez niego lunetkę - moim zdaniem tej podstawowej czynności nie wykonałeś.
-
No a wogóle to ciekawa inicjatywa, nie pisałeś nic o tej kamerze, może coś skrobniesz na jakim sensorze i takie tam...
pozdrawiam !
BTW. w 300D też występuje z tym problem
Testuję kamerę Pyxis opartą na chipie: http://www.kodak.com/US/en/dpq/site/SENSOR...AF-6303_product
w tej chwili największy problem z jaki msię borykam to właśnie bloomy stąd ten temat.
Więcej tutaj:
-
tak, dzisiejsze ślimaki rozwijają prędkość iście zajęczą

a obsługa goto za pomocą kliknięcia mychą po prostu rozaniela
gratulacje, bo to już jest prawdziwy wypas
THX

To rozanielenie udziela się szczególnie wtedy gdy nie miało się GoTo

-
Faktycznie widowisko wczoraj było spektakularne, szkoda, że nie miałem czasu pojechać w jakieś wyższe miejsce

-
 3
3
-
-
Czuję sie w obowiązku dopisać kolejny fragment recenzji, otóż dzięki wykonanej przez Leszka Jędrzejewskiego przejściówce - udało mi się uruchomić GoTo sterowane z laptopa. Co dzięki temu zyskujemy ? Pełne dowodzenie montażem i brak pilota GoTo oraz Guid bez np ST4 (tego muszę się jeszcze nauczyć
)Wczoraj przeprowadziłem pierwsze poligonowe testy, które wypadły naprawdę bardzo zadowalająco
Nie rozwinięty panel konfiguracyjny z mapą CdC wygląda tak:
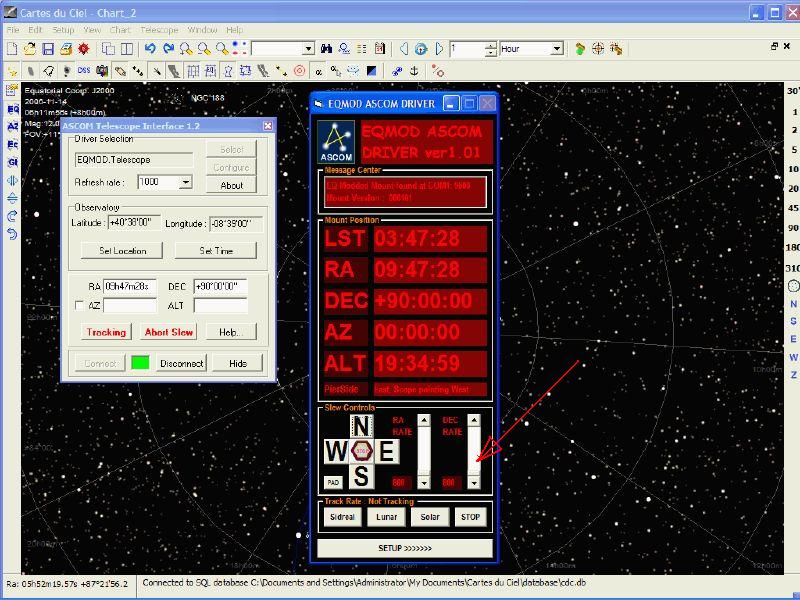
Strzałką zaznaczyłem suwaki do płynnej regulacji prędkości przemieszczania się głowicy.
Właściwie prędkość x 800 jest zbyteczna, ja ustawiałem x 300 i to z kilku powodów, jednym z nich jest to, że nie chcę przemęczać ślimaka
Co do samego GoTo to jest jak ma być - trafia idealnie w obiekt, który po prostu zaznaczmy w CdC
Co więcej w wydaniu komputerowym mamy jeszcze następujące możliwości takie jak:
GOTO/SLEW at 0.144 resolution (depending on the accuracy of the planetarium database)
- SYNC (via ASCOM / Planetarium Software)
- PARK TO HOME/PARK TO CURRENT/UNPARK
- 1 STAR ALIGNMENT (2-STAR, N - STAR to follow)
- PULSEGUIDE (at variable speed rates and with 'duration' parameter support and duration overide)
Other Functions include;
- SIDEREAL, LUNAR, SOLAR TRACKING
- AUTOGUIDER PORT SPEED RATE SETTING (RA and DEC speeds can be set independently)
- VARIABLE SLEW SPEEDS which can be set from x1 to x800 of the sidereal rate
- NORTH and SOUTH Hemisphere support
- EQMOD SLEWPAD - Interface that allows a three button mouse as a SLEW HAND PADDLE
- GPS SUPPORT (using NMEA streams)
- PEC TRAINING (via hand control or PULSEGUIDE sequence) AND PLAYBACK (encoder position accurate)
- BACKLASH COMPENSATION (current not active since most of the EQ designs does not require backlash )
- USER PROGRAMMABLE TRACKING RATES (both on DEC and RA)
c.d.n
-
Ponieważ zasugerowano mi pewna nieścisłość w opisie więc poprawiam w pkt 5 powinnobyć: kabelek do połączenia GP z Vestą i Laptopem
czyli w skład zestawu nie wchodzi Laptop i kamerka Vesta -
Tak prezentują się poszczególne elementy systemu:

-
chodzi mi zasadniczo o te kreski do samej krawędzi. jezeli chodzi o ten obrót o 180st to moze sie zdarzyc ze korzystniejszy jest obrót o mniej lub wiecej niz 180st. chodzi o przypadek gdy gwiazdy blumujace wypadaja dokładnie pod sobą i blum pomiedzy nimi nie powinien w staku nachodzić na siebie.
Masz rację powinno zadziałać:
http://www.geocities.co.jp/Technopolis/526...anotherNBR.html
-
kierunku zczytywania pixeli

ps. czyli prostopadle do ziemi (wektor normalny do płaskiej ziemi) nie no żartuje oczywiście
Bloomy rozchodzą się w dwóch kierunkach


EQ-6 Czy HEQ-5
w Dyskusje o astrofotografii
Opublikowano
No nie do końca kwota się zgadza:
Vesta 400,-
Rubinar 300/5.6 650,-
cena przejściówki 50,- jest raczej optymistyczna i należy doliczyć jeszcze jakiś kabelek połączeniowy.
Po za tym należy to jakoś wszystko połączyć zestalić i w czymś przechowywać - dołóżmy lekko licząc 300,-
Czyli mamy 3900,- + min 1500,- = 5400,- + Laptop na który jak uważam nalezy wydać min 1000,-
do tego np 80ED 1600,- = 8000,-
No i oczywiście detektor, ale to już zupełnie osobny temat