

_vk_
-
Postów
769 -
Dołączył
-
Ostatnia wizyta
Typ zawartości
Profile
Forum
Blogi
Wydarzenia
Galeria
Pliki
Sklep
Articles
Market
Community Map
Odpowiedzi opublikowane przez _vk_
-
-
Napęd - mechanika zakończona



-
 3
3
-
-
Kolejne foty. Tym razem obudowa sterownika.


-
1
-
-
Ja widzę tylko komunikaty: "Zdjęcie niedostępne" :/
Mam to samo
-
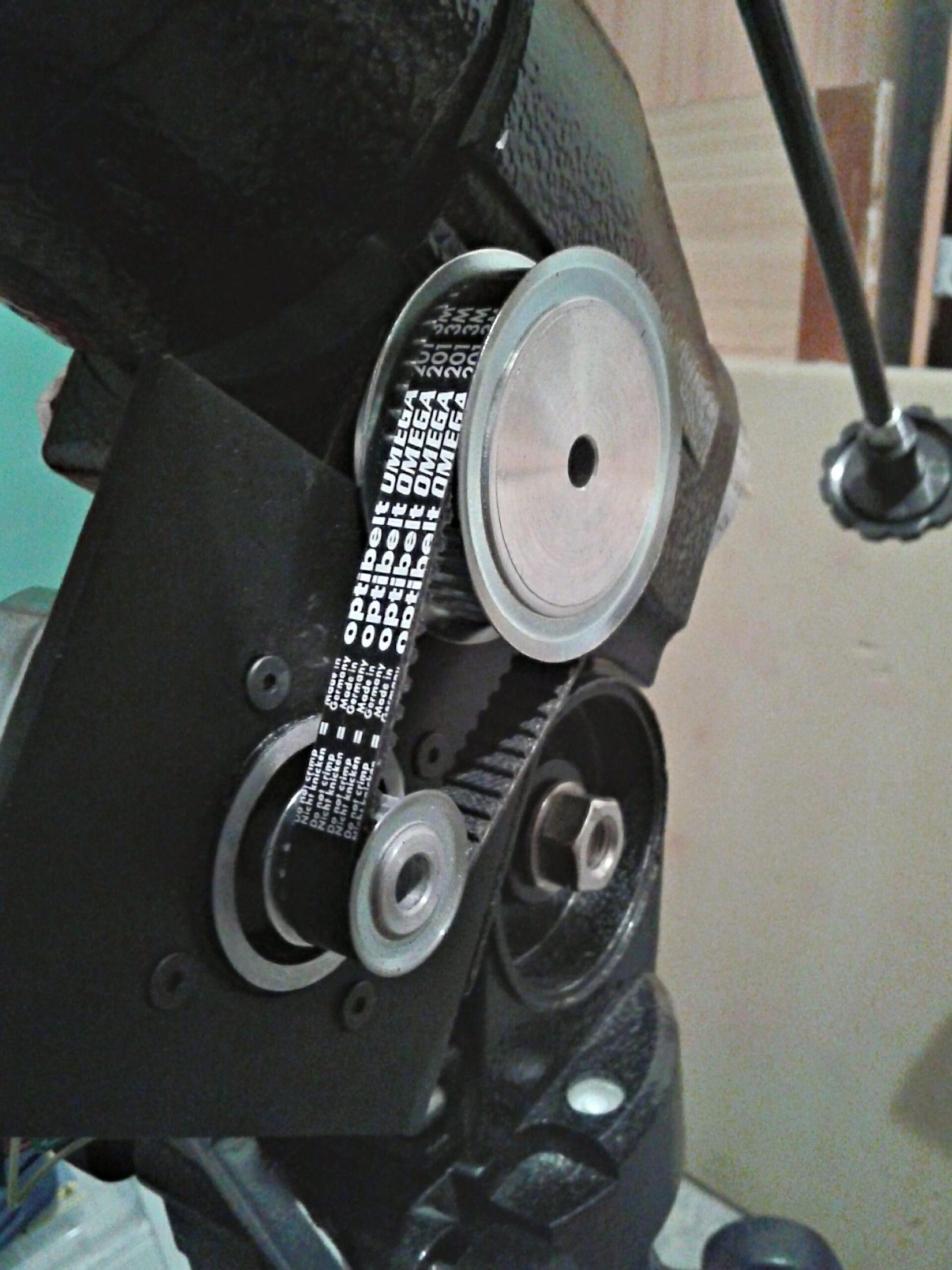
Wracam do tematu.
Mocowanie silnika i przekładni już za mną. Pasek naprężony jak trzeba. Wszystko chodzi bardzo płynnie i bez oporów.
Płytka sterująca silnikiem, LCD’kiem i klawiaturą też już działa.
Trzeba to jeszcze zamknąć w jakiejś obudowie.
-
Pietro - wielkie wow.
-
Może wyjęcie baterii podtrzymującej pomoże?
-
Nie mam pojęcia jaką grubość materiału obsługuje ten ploter, trzeba by najcieńszą płytę wybrać i mogło by dać radę, musisz sprawdzić w specyfikacji plotera.
Trzeba by sprawdzić jak to się zachowa, bo w sumie to wnętrze tego piankokartonu jest dość miękkie.
1mm - może być problem?
-
Jedno pytanie. Czemu te uchwyty dałeś w tą stronę? Ura, dzięki za info o materiale. Mam wycinarkę Cricut. Myślisz, że dało by radę wykonać maskę bahtinova z tego kompozytu?
-
Z okularem 2,5 przesadziłś, myslę, że jakieś szerokie 10mm będzie ok.
-
Myślę, że Spinor, Pentaflex, Danubia i Sky Watcher jest produkowany w tej samej chińskiej fabryce. Nazwa zmienia się w zależności od dystrybutora. Możliwe, że największy z dystrybutorów jakim jest SW bardziej restrykcyjnie podchodzi do kontroli wyprodukowanych szkieł i korpusów. Osobiście miałem (w tym samym czasie) Danubie, Pentafleksa, Spinora i SW i po kilku testach zostawiłem sobie właśnie Spinora. Teraz zmieniłem go na Maka 102. Jeszcze jedna obserwacja jaka rzuca się w oczy to fakt, że im nowszy teleskop tym wykonanie dodatków gorsze. Co do Bresser Massier: nie wypowiadam się, bo nigdy nie miałem go u siebie.
-
Jeszcze raz dzięki. Co do pomyłki to 200 kroków dla EM-429 uzyskałem sterując go co pól kroku.
-
Ja jestem za robieniem flatów, bo oprócz winiety niwelują zabrudzenia optyki.
-
Dzięki MateuszW za sprawdzenie obliczeń. Po przeanalizowaniu data sheet'ów A4988 i DRV8825 zdecydowałem się na zakup A4988. Jak widać z obliczeń zbliżyłem się do zdolności rozdzielczaej Maka 102 (1,1'') - i to już chyba wystarczy. Inna sprawa, że to 1/32 w przypadku DRV8825 to może być już marketing.
Ilość zębów koła RA : 144
Skok ślimaks osi RA: 1
Ilość zębów dużgo koła pasowego: 44
Ilość zębów małego koła pasowego: 10
Przekładnia ślimaka osi RA: 144
Przekładnia kół pasowych: 4,4
Przekładnia całkowita: 633,6
Ilość sekund doby gwiazdowej: 86146
Kroki silnika na obrót: 1600
Kroki silnika na obrót osi RA: 1013760
Taktowanie silnika : 0,08497672
Skok osi RA [°]: 0,000355114
Skok osi RA ['']: 1,278409091 -
Dzięki kuba_527, kupuję A4988 i próbuję. Jak nie da rady to zamienię silnik na 1Nm dający 400 kroków na obrót.
-
W wątku chciałbym pokazać jak tanim kosztem zrealizować projekt napędu osi RA.
Mam też nadzieję na konstruktywną krytykę z Waszej strony, która pozwoli uniknąć błędów i niepotrzebnych wydatków.Elementy, które do tej pory zebrałem:
- Silnik krokowy: EM-429 – rezystancja uzwojenia 9 Ω, 200 kroków na obrót (1,8 stopnia/krok) - nic więcej w necie o tym silniku nie znalazłem, obawiam się, czy pociągnie MAka 102.
- L293 - Scalony, podwójny mostek H
- Koła zębate/pasowe 3M jak na rysunku (44 3M 09, 10 3M 09)
- Płytka rozwojowa z procesorem M16C, LCD, USB itp. (programowanie płytki USB,I2C, SPI mam opanowane), komunikacja PC <-> płytka działa stabilnie.
Obliczenia:
- Ilość zębów koła RA : 144,
- Skok ślimaks osi RA: 1,
- Ilość zębów dużgo koła pasowego: 44,
- Ilość zębów małego koła pasowego: 10,
- Przekładnia ślimaka osi RA: 144,
- Przekładnia kół pasowych: 4,4,
- Przekładnia całkowita: 633,6,
- Ilość sekund doby gwiazdowej: 86146,
- Kroki silnika na obrót: 200,
- Kroki silnika na obrót osi RA: 126720,
- Taktowanie silnika : 0,679814
- Skok osi RA [°]: 0,002841,
- Skok osi RA ['']: 10,22727
Realizację 200 kroków na obrót udało mi się już zaprogramować, ale zastanawiam się czy zrezygnować z L293 i zastąpić go sterownikiem A4988?
Tak jak napisałem wszelkie sugestie mile widziane.


-
Moim zdaniem idziesz w dobrą stronę i zachęcam, być jeszcze popracował trochę na tym materiale.
-
To ja też się pochwalę - Księżyc z 31.08.2015 ok 21:30.
Canon 350d, Mak 102mm, 24 klatki - ISO800.
Po osiem klatek z czasami naświetlania odpowiedni: 0.017s, 0,067s i 0.00040s.
Obróbka wg receptury Jolo z poniższego posta + HDR:
http://www.forumastronomiczne.pl/index.php?/topic/6914-obrobka-zdjec-ksiezyca-z-lustrzanki/

-
2
-
-
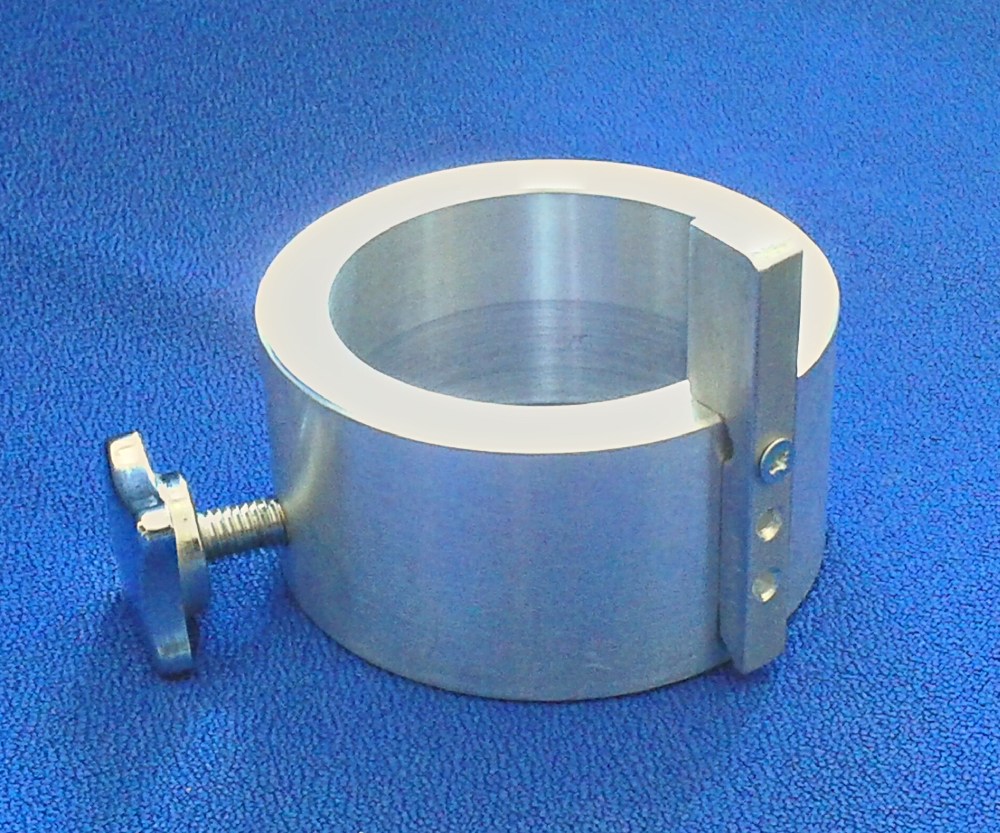
Taka blokada jest o tyle ok, że działa też z pierścieniami.
-
Zrobione. Działa świetnie. Teraz napęd.




-
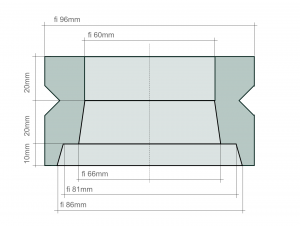
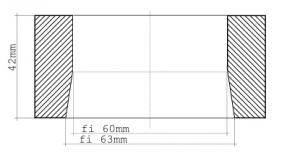
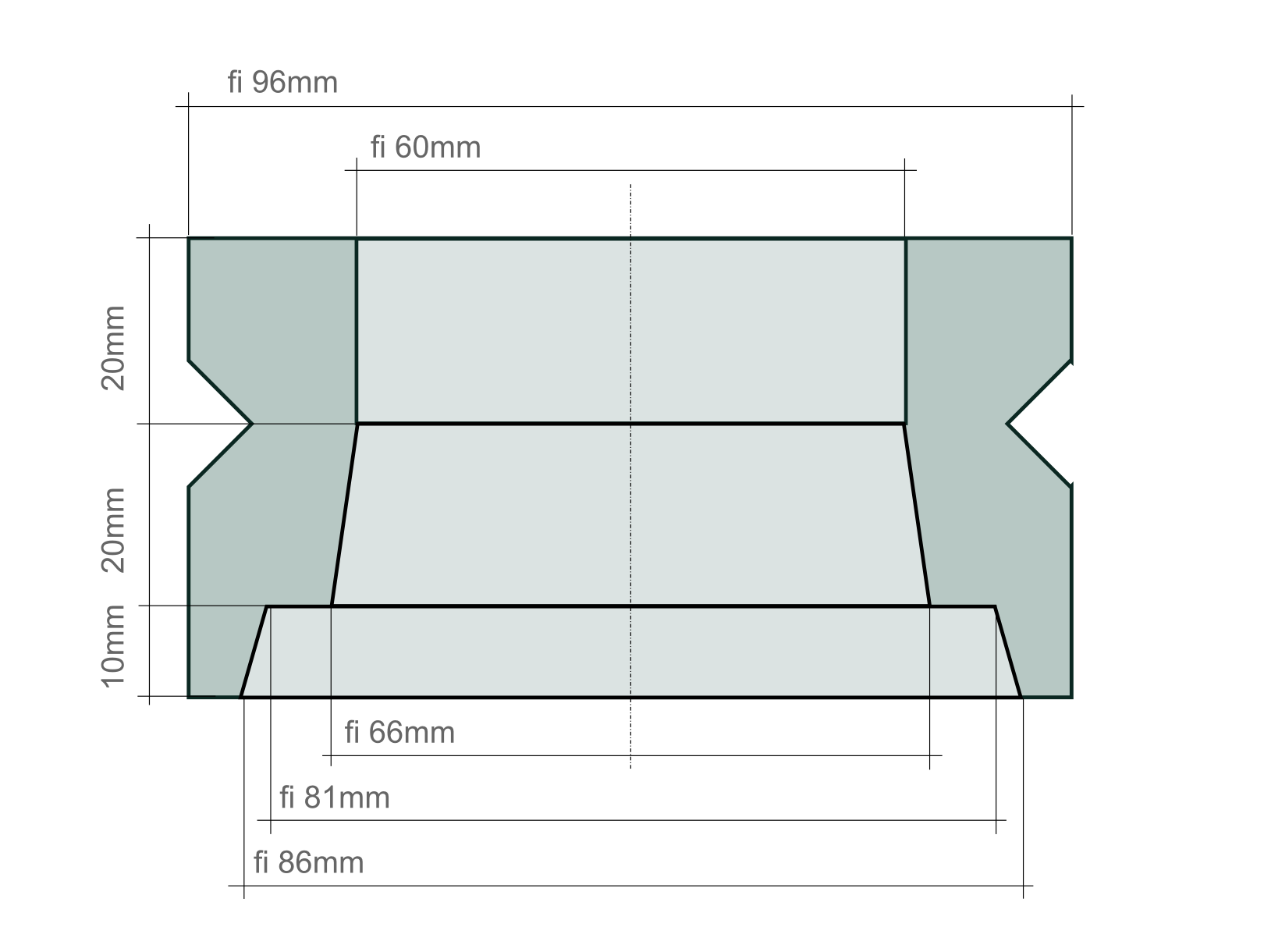
Ostateczna wersja, której wytoczenie zleciłem wygląda jak na załączonym obrazku. Jak tylko ją dostanę wrzucę fotki.
-
Silnik jeśli działa to zaprzecza jednej z fundamentalnych zasad fizyki: zasadzie zachowania pędu.
-
1
-
-
Hamal, czy żona czyta Twoje posty? Jeśli tak, to czy nie jest zazdrosna? Żarcik taki.
-
2
-
-
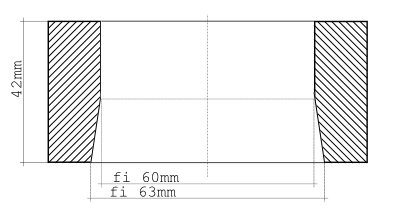
Adapter będzie wyglądać jak na obrazku poniżej. Po wytoczeniu wrzucę foty.
-
1
-
-
Iluvatar napisz jaką funkcjonalność będzie miał Twój AstroHub i jakie standardowe protokoły będzie implementował.
Zamierzam na forum wystartować mój projekt sterownika silnika krokowego osi RA, sterowanego z PC z wyświetlaczem LCD. Zastanawiam się też nad sterowaniem Canonem 350d.










Napęd osi RA do montażu CG4.
w ATM, DIY, Arduino
Opublikowano
Eltom w czewie około 10 pln za kółko i 10 za pasek