
WielkiAtraktor
-
Postów
1 661 -
Dołączył
-
Ostatnia wizyta
-
Wygrane w rankingu
8
Typ zawartości
Profile
Forum
Blogi
Wydarzenia
Galeria
Pliki
Sklep
Articles
Market
Community Map
Odpowiedzi opublikowane przez WielkiAtraktor
-
-
Dzięki!
18 godzin temu, yeabuny napisał(a):Mega ci to wyszło, mogę pomóc w przyszłej ulepszonej konstrukcji "szukacza"Jaj to wszystko ogarnąłeś tak sam?
Ogarniałem bez pośpiechu, jakieś 4 miesiące na to zeszły
") Od strony technicznej: użyłem mojego ulubionego (od 2017 r.) języka Rust (acz równie dobrze można by to napisać w Pythonie itp.); strona obliczeniowa nie wykracza poza poziom szkoły średniej (parę iloczynów skalarnych i wektorowych); samo podążanie za celem to najprostszy regulator proporcjonalny (zob. kod), czyli P z PID (jako że pasażerskie na przelotówce gwałtownych manewrów nie robią).
5 godzin temu, Miesilmannimea napisał(a):
Od strony technicznej: użyłem mojego ulubionego (od 2017 r.) języka Rust (acz równie dobrze można by to napisać w Pythonie itp.); strona obliczeniowa nie wykracza poza poziom szkoły średniej (parę iloczynów skalarnych i wektorowych); samo podążanie za celem to najprostszy regulator proporcjonalny (zob. kod), czyli P z PID (jako że pasażerskie na przelotówce gwałtownych manewrów nie robią).
5 godzin temu, Miesilmannimea napisał(a):Mi to wygląda na produkt podwójnego przeznaczenia
")
Ee, to nie radar pasywny (który można zrobić z kilku SDRów), żeby ITAR zabraniało 😁
4 godziny temu, barti1972 napisał(a):Ale nie do końca jeszcze kumam: a) najpierw centrujesz obraz manualnie, a potem już montaż podąża sam na podstawie toru lotu, czy też b) kamera analizuje obraz i koryguje montaż, aby samolot nie uciekł z kadru?
Po centrowaniu manualnym montaż sam podąża — ale że odchyłka się zmienia, po chwili znów trzeba centrować. W praktyce non-stop wykonuję (możliwie) delikatne ruchy joystickiem, żeby mieć w środku kadru kamery głównej. Na gamepadzie to dość wygodne. Kolejnym krokiem będzie automatyczna synchronizacja na podst. obrazu, jak piszesz (mam to już w Vidoxide, na razie do autoguidingu na ciałach niebieskich, będę musiał to jakoś pożenić).
4 godziny temu, pki1234 napisał(a):a meridian flip jest wliczony w algorytm? 😉
W konfiguracji azymutalnej nic nie trzeba flipować, jako że teleskop celuje tylko w [0°; 90°) nad horyzontem. Ale dodam opcję pracy z montażem pochylonym (tylko muszę to rozkminić geometrycznie), żeby osobliwość (biegun) nie wypadała w zenicie (czyli tam, gdzie najlepiej się foci), bo wtedy oczywiście wymagana szybkość obrotu osi azymutu dąży do nieskończoności. Już parę razy tak miałem, że jak na złość przelatywało coś prawie dokładnie nad głową i montaż nie nadążał.
Zestaw z refraktorem 90/660 mm:

Z GSO RC8:
Tu jeszcze krótki filmik z działania programu plane-tracker (odtwarzam na nim nagraną uprzednio sesję; ze wzgórza o ok. 600 m wys. wzgl. złapałem sygnał ADS-B nawet z ~480 km):
-
- Ta odpowiedź cieszy się zainteresowaniem.
- Ta odpowiedź cieszy się zainteresowaniem.
Od czasu pierwszych prób z fotografowaniem samolotów na wysokości przelotowej przez teleskop chodziło mi po głowie, żeby proces zautomatyzować - oto wyniki.
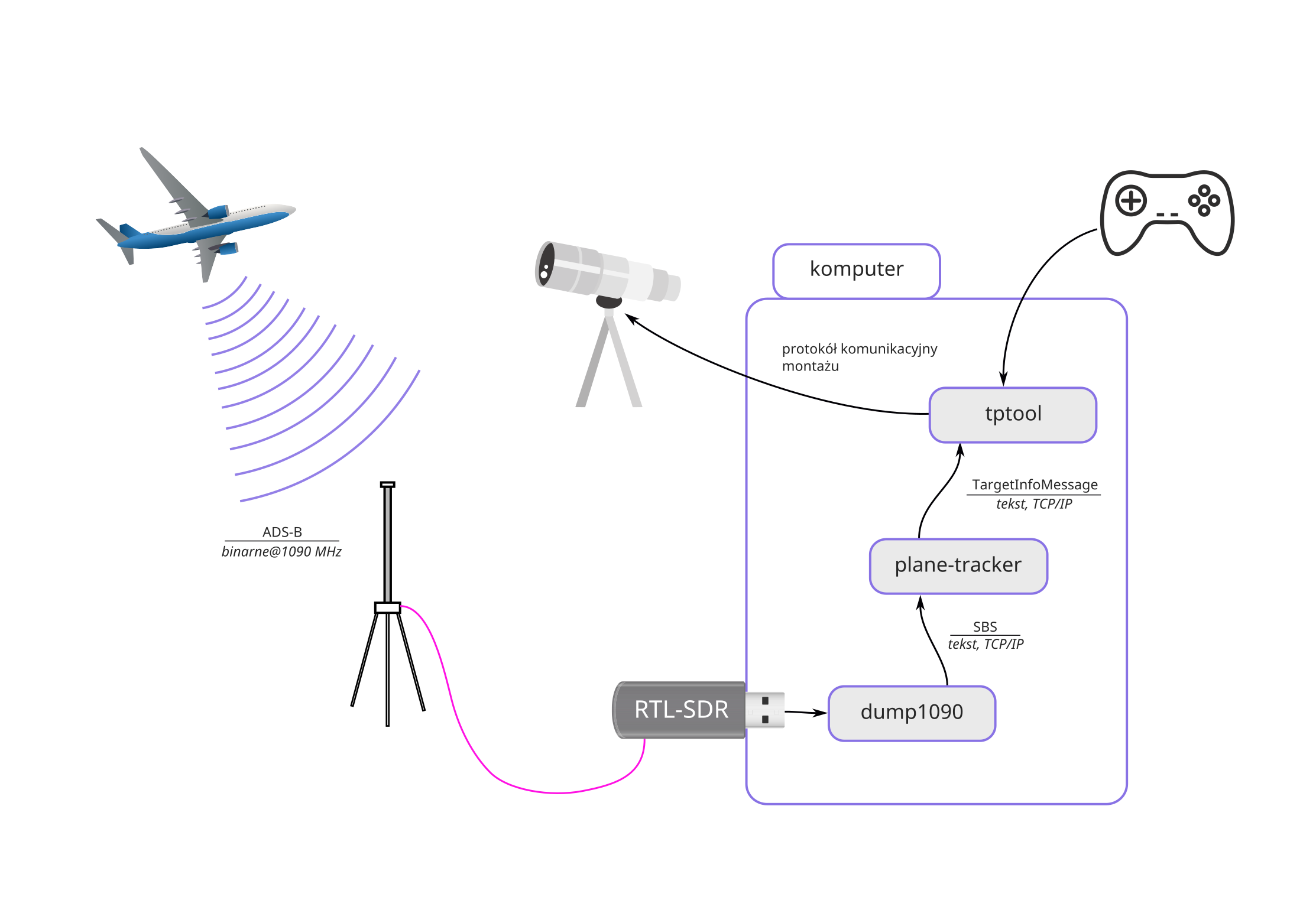
Na mój nowy zestaw składają się:
- odbiornik ADS-B (non-stop wysyłane przez statki powietrzne dane o parametrach lotu): RTL-SDR na USB (R820T2) z anteną zewnętrzną (zaopatrzyłem się w ten zestaw)
- montaż iOptron HAE69B, umożliwiający płynną zmianę prędkości obydwu osi w pełnym zakresie (więcej o tym poniżej)
- Plane Tracker: program wyświetlający pozycje (i in.) okolicznych samolotów
- TPTool: program do sterowania montażem i płynnego śledzenia ruchomego celu na sferze niebieskiej
Ww. programy są mojego autorstwa; kod źródłowy i wersje zbudowane dla Windows do pobrania pod powyższymi odnośnikami.
Wszystko współpracuje ze sobą następująco:
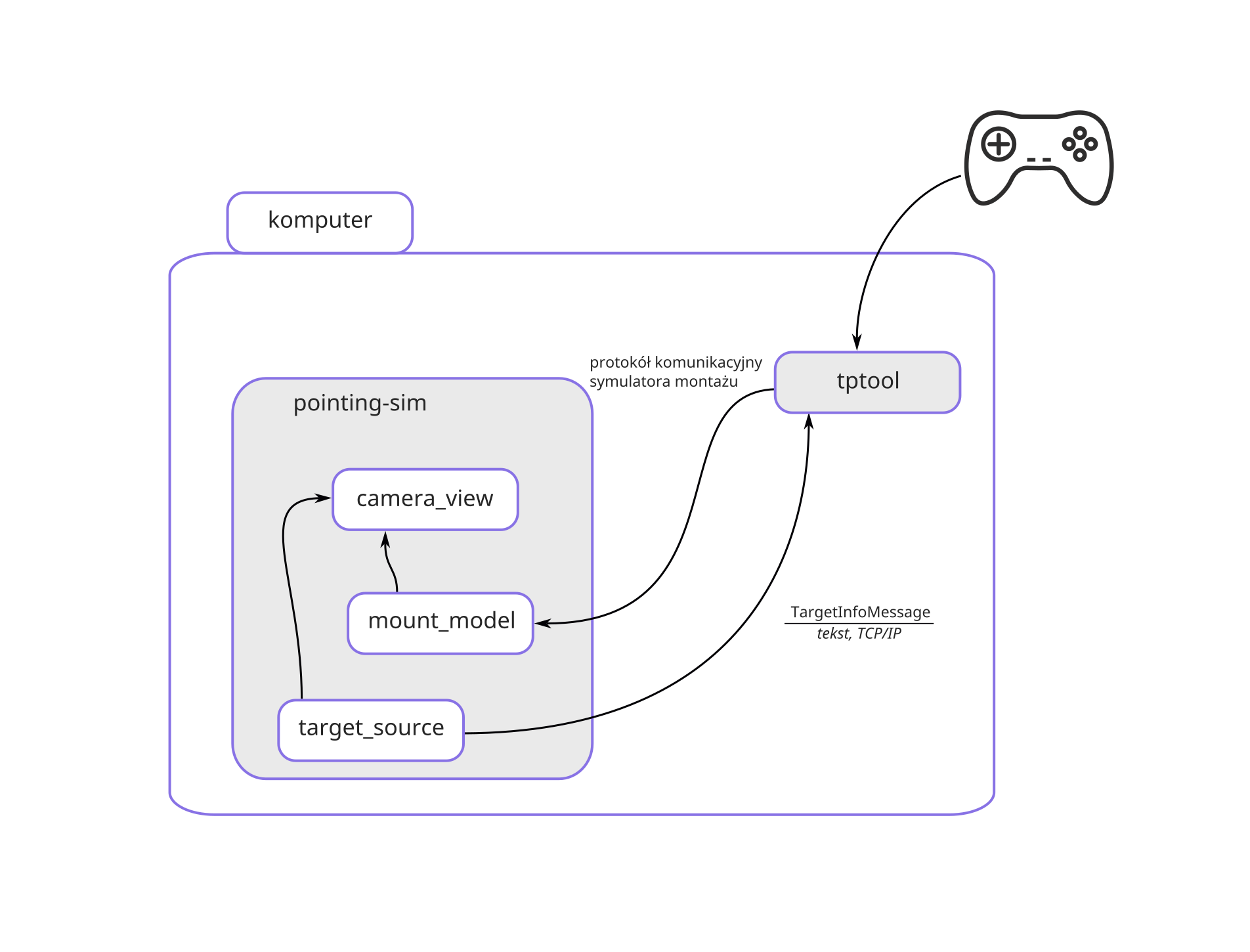
Oczywiście ciężko byłoby nad tym pracować, gdybym musiał wszystkie testy i próby przeprowadzać pod niebem (zwłaszcza w okresie zimowym) — dlatego stworzyłem jeszcze symulator (pointing-sim), który zastępuje teleskop, kamerę, montaż i źródło danych o celu (samolocie):
Przykładowa sesja z symulatorem (TPTool + gamepad + pointing-sim)
Więcej informacji o obsłudze programów można znaleźć w plikach README i samouczku.
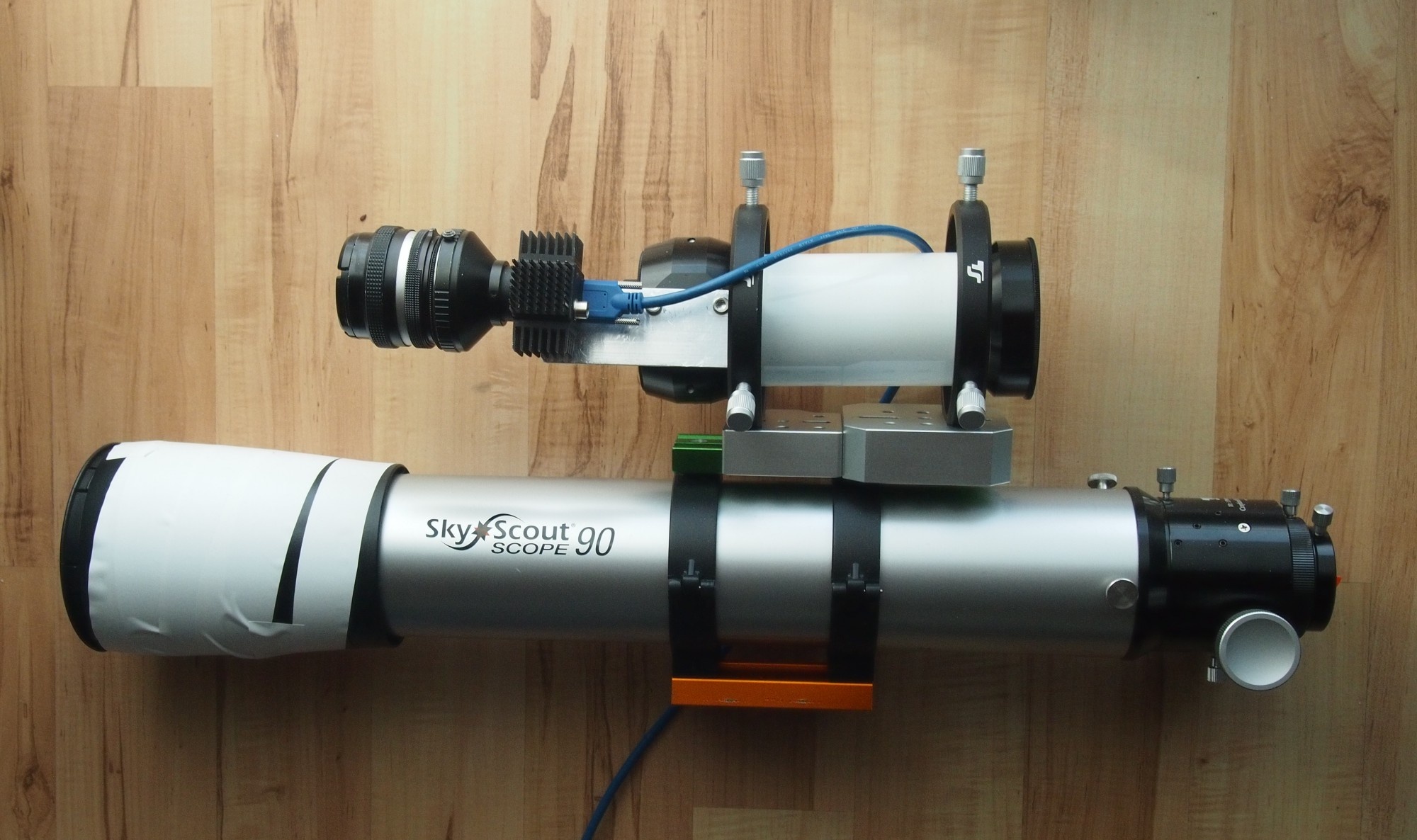
W praktyce zestaw nie celuje w wybrany samolot idealnie (wg logów TPTool odchyłki są po 2-3 stopnie), zapewne przez niedokładnie zorientowanie montażu i/lub rozjazd czasowy komunikatów ADS-B. Dlatego używam guidera (obiektyw 50 mm + kamera 1/3"), żeby wycentrować cel w kamerze głównej za pomocą kontrolera do gier. Na początku musiałem poskładać coś na szybko (to białe to tuba Lunta 50):
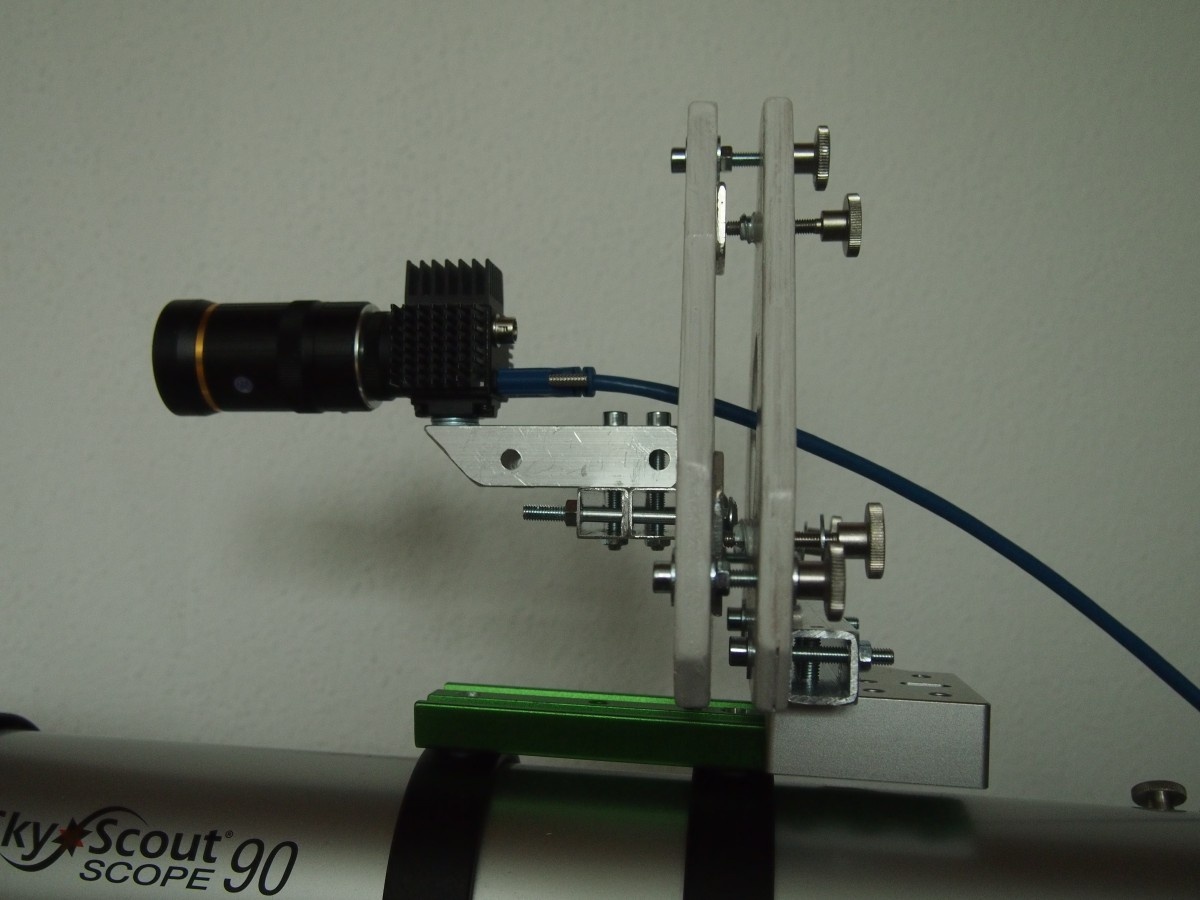
ale potem kupiłem mniejszy obiektyw C-mount i zbudowałem justowalną platformę:
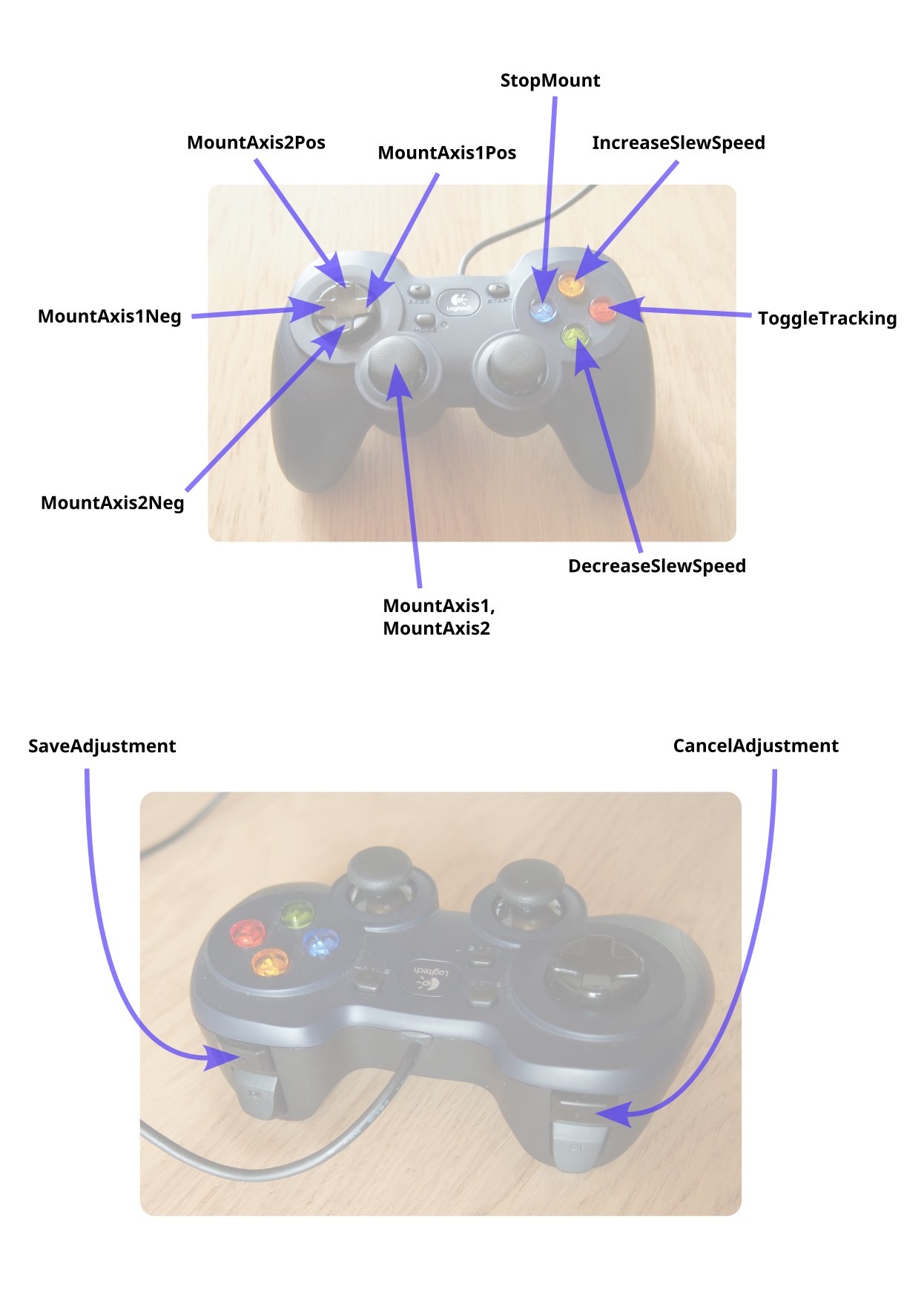
U siebie akcje kontrolera (Logitech F310) mam skonfigurowane następująco (szczegóły w samouczku):
(pod pozostałe 2 analogowe spusty podepnę jeszcze sterowanie DreamFocuserem mini, tylko muszę zaimplementować obsługę).
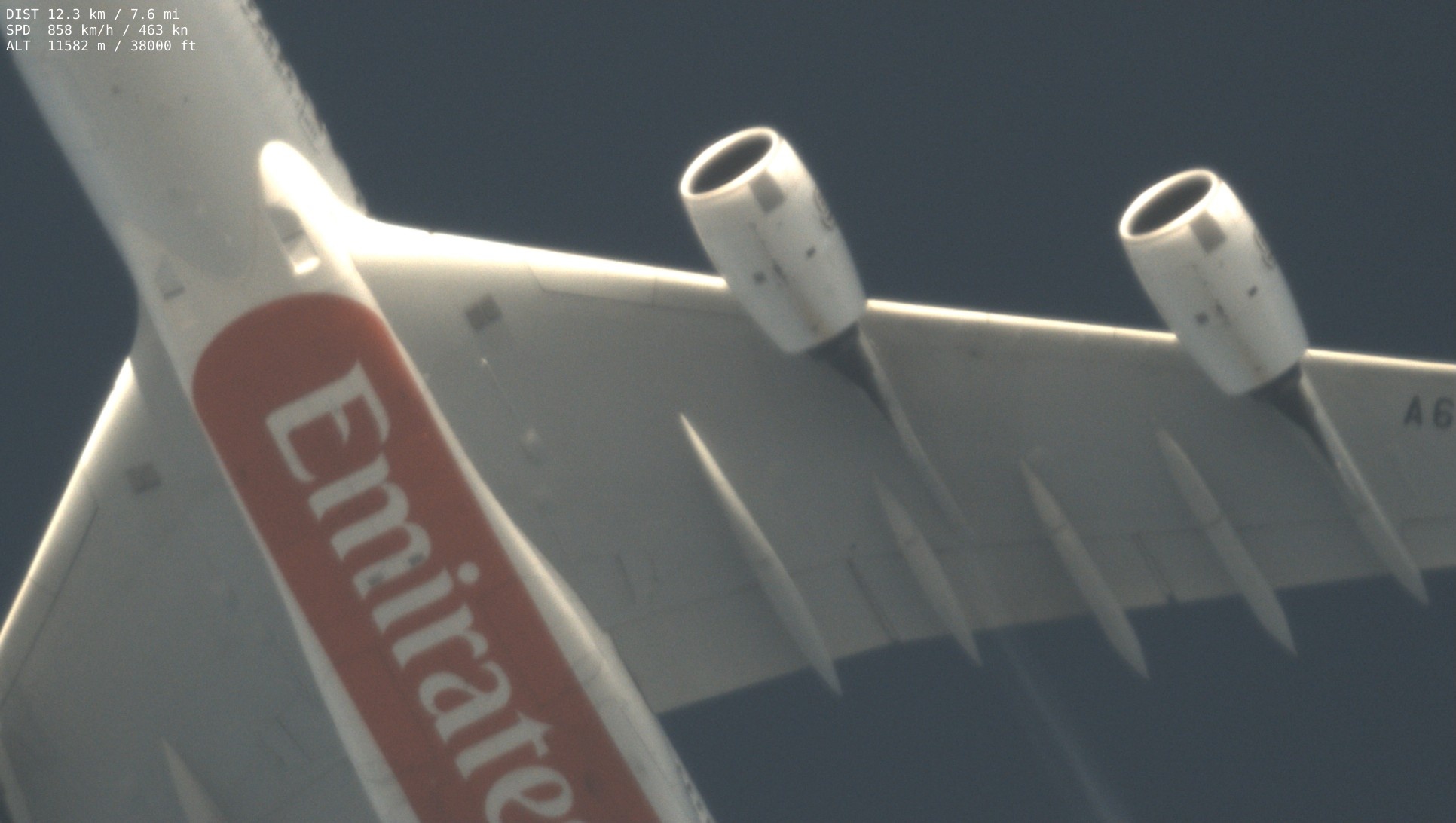
Przykładowe nagrania (kamera ASI 462MC):
- refraktor 90/660 mm:
- GSO RC8 (200/1600 mm) - słaba przejrzystość, ale niezły seeing:
Drgania i „pływanie” obrazu w drugim wideo to najwyraźniej nakładanie się wibracji zestawu i rytmu odczytu migawki postępowej. Możliwe, że to przez fakt założenia pręta z przeciwwagą (HAE69B przy takim obciążeniu jeszcze jej nie potrzebuje, sprawdzę to następnym razem; bądź przymocuję jakieś małe worki z piaskiem dla stłumienia), bo wiatru praktycznie nie było.
UWAGI
Obecnie TPTool obsługuje tylko montaże iOptrona (bezpośrednie połączenie szeregowe) posiadające tzw. „special mode” (płynna zmiana prędkości w pełnym zakresie i odczyt bieżącej pozycji dla obydwu osi), tj. serie HAZ, HAE i AZMP. By dodać inny montaż, należy zaimplementować ten interfejs.
Narzędzie dump1090 do dekodowania danych ADS-B dostępne jest np. w repozytoriach dystrybucji Linuksa. Wersja zbudowana dla Windows: link.
-
 11
11
-
 2
2
-
 11
11
-
3 godziny temu, Herbert West napisał(a):
Condor to 6 refraktorów TEC APO180mm "po tuningu", żeby zminimalizować wewnętrzne odbicia i rozproszenie światła.
Stworzenie Dragonfly również było m.in. tym motywowane, jak wspomniano w starszym poście.
-
1
-
-
36 minut temu, Miesilmannimea napisał(a):
przykładowo aparaty cyfrowe mające kilka lat - gdyby podmienić firmware
Mamy już MagicLantern dla Canonów - można np. nagrywać wideo w postaci RAW (na kartę - ciekawe, czy jakiś live streaming na zewnątrz po USB dałoby się zrobić).
-
Dobry pomysł, też muszę naprawić swój LT1. Myślicie, że wystarczyłoby bezpośrednio nagwintować otwór na M8 w takim profilu 5 mm? Zmieściłyby się 4 zwoje.
-
23 godziny temu, Swiss napisał(a):
Czy możesz wrzucić zdjęcie całego zestawu? Chciałbym sobie wyobrazić jak to wygląda.
Oto on:
Dokładny opis pisze się
-
3
-
-
Na zupełny początek DS proponuję też łapanie Drogi Mlecznej ze statywu; wychodzi nawet z podstawowym "kitowym" obiektywem, sam kiedyś spróbowałem (potem zostałem jednak słonecznikiem/planeciarzem).
-
1
-
-
Seeing i chmury nadal nie rozpieszczają, ale przynajmniej przetestowałem delikatniejsze ręczne sterowanie:
Achromat 90/660 mm, ASI462MC.
Niech tylko przyjdą lepsze warunki, to zawieszę na montażu coś większego.
-
4
-
-
2 godziny temu, szuu napisał(a):
Posuwając się jednak dalej dochodzimy do fal niezbadanych, a to do fal powyżej 0.06 mm. Czy takie istnieją — czy dadzą się wytworzyć
Co mogą zdziałać, to wiemy, ale z wytwarzaniem wciąż kiepsko; za hasłem Terahertz radiation na Wikipedii:
CytatIn engineering, the terahertz gap is a frequency band in the THz region for which practical technologies for generating and detecting the radiation do not exist. It is defined as 0.1 to 10 THz (wavelengths of 3 mm to 30 µm) although the upper boundary is somewhat arbitrary and is considered by some sources as 30 THz (a wavelength of 10 µm).[27] Currently, at frequencies within this range, useful power generation and receiver technologies are inefficient and unfeasible.
-
1
-
1
-
-
Temat pokrewny: SCT ze zbitym korektorem przerobiony na Dall-Kirkhama.
-
1
-
-
Jeszcze uwaga co do „otwartoźródłowości” ZWO: podobnie jak u innych producentów, dostępne jest SDK do obsługi kamer, tak że można je wykorzystać np. ze swoim oprogramowaniem (bez problemu używam swojej ASI z Vidoxide pod Linuksem).
-
2
-
-
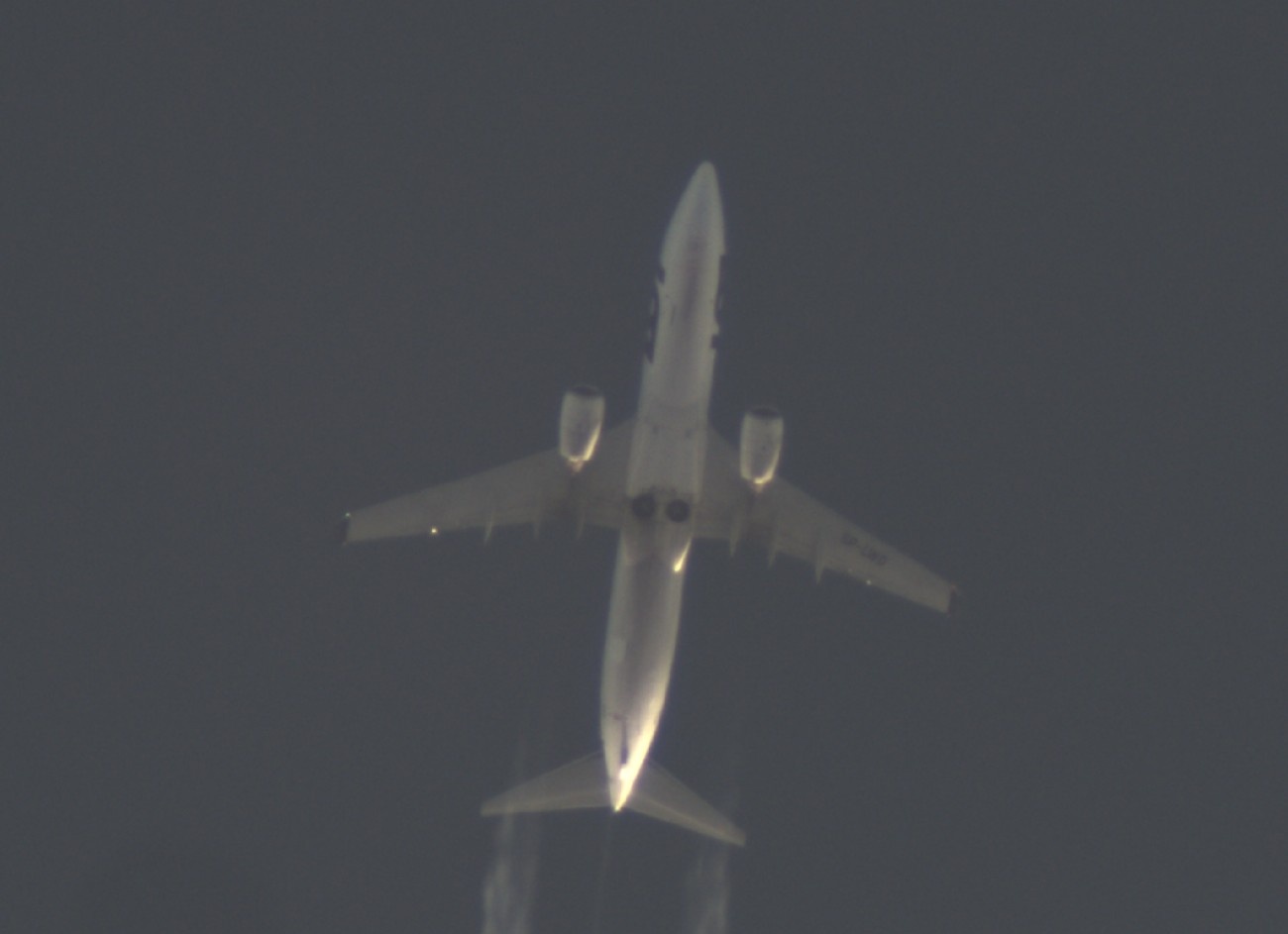
Sesja nr 2, tym razem dodałem guider i mogłem spokojnie naprowadzić na cel (zamiast szukać samolotu na ślepo jak ostatnio po zgrubnym wycelowaniu). Niebo bardzo mgliste i kiepski seeing, ale coś wyszło. Achromat 90/660 mm na pełnej ogniskowej (poprzednio ok. 350 mm z reduktorem), ASI462MC:
Dłuższa składanka (naniesiono dane o celu z ADS-B):
W zwolnionym tempie (ok. 4,6x, 137 -> 30 fps):
Widok z guidera (obiektyw foto 55 mm):
Muszę się jeszcze nauczyć delikatniej operować joystickiem (i podpiąć zmianę szybkości tych korekt pod któryś przycisk na kontrolerze).
-
5
-
-
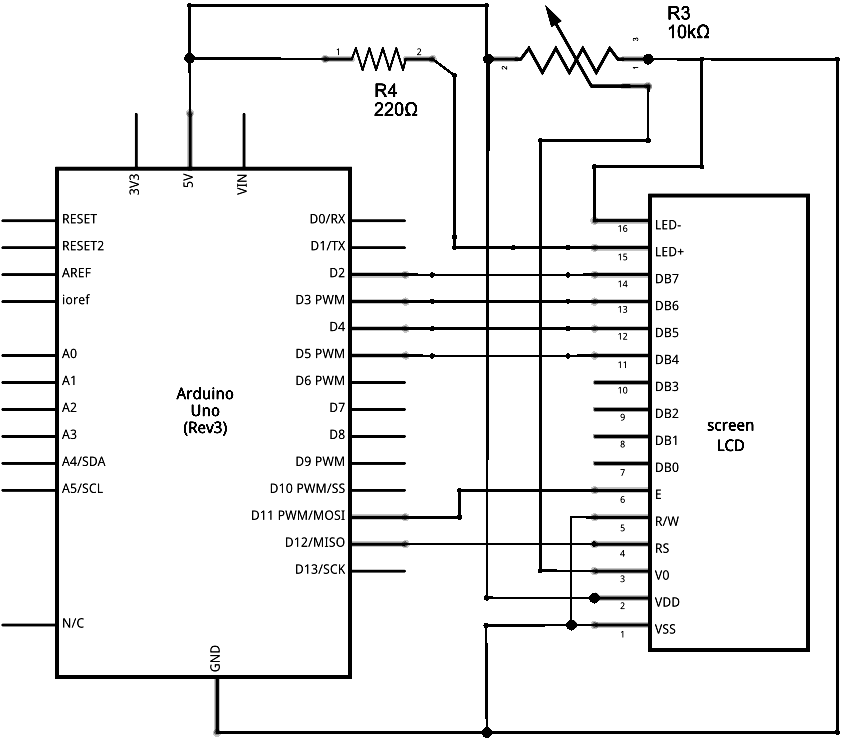
Obie wersje korzystają z Arduino Micro.
Wersja z LCD jest połączona zgodnie z tym zaleceniem:
Piny RS, EN i D4-D7 wyświetlacza są przypisane wyjściom Arduino (zob. mój kod) odpowiednio: 12, 11, 5, 7, 4, 9.
Wersji z OLED nie skończyłem i widzę właśnie, że gdzieś zapodziałem schemat. Ale wyświetlacz to SH1106 z komunikacją po SPI (bodajże ten).
-
Narzędzie dump1090 z Netu (np. tutaj jest aktualnie utrzymywany fork), pozostałe sam napisałem (dwa ostatnie linki w poprzednim poście prowadzą do repozytoriów). Wkrótce napiszę dokładny tutorial, jak tego używać.
-
1
-
-
1) Odbiornik RTL-SDR na USB, np. taki, ok. 30 €; do niego jakaś antena (w podanym sklepie są też zestawy z anteną; mam tę zewnętrzną).
2) Montaż dający się ustawić w konfiguracji azymutalnej oraz umożliwiający płynną zmianę prędkości obydwu osi w pełnym zakresie i odczyt pozycji osi w czasie rzeczywistym (niestety, „klasyki” jak SW HEQ5 czy iOptron CEM tego nie mają). Mój obecny program jest dostosowany do iOptronów z obsługą "special mode", tj. serie HAZ, HAE, AZMP.
3) Dodatkowa kamerka i mały guider, bo w praktyce nie trafia idealnie (zapewne przez nieprecyzyjne zorientowanie montażu i/lub niewielki rozjazd czasowy komunikatów ADS-B).
4) Zalecany gamepad/joystick do małych ręcznych korekt.
5) Oprogramowanie do dekodowania ADS-B (dump1090, dostępny m.in. w dystrybucjach Linuksa), wyświetlania okolicznych samolotów i sterowania montażem (moje) - darmowe.
-
3
-
-
- Ta odpowiedź cieszy się zainteresowaniem.
- Ta odpowiedź cieszy się zainteresowaniem.
Po 9 latach wracam do polowania. Wczoraj udało się uzyskać pierwsze światło z nowego zestawu — odbiornik ADS-B + program sterujący montażem, który automatycznie celuje i podąża za wybranym samolotem (+ ręczne poprawki gamepadem; potem opiszę dokładniej w osobnym wątku). Na razie tylko mały refraktor, ~300 mm ogniskowej:
-
9
-
1
-
Dodaję dokumenty, bo zewnętrzne linki są zawodne:
An-Inexpensive-Solar-Scintillation-Seeing-Monitor-Circuit-with-Arduino-Interface-final2.pdf
A SEEING MONITOR FOR SOLAR AND OTHER EXTENDED OBJECT OBSERVATIONS.pdf
-
2
-
-
Do zestawu proponowałbym jeszcze krótką łukową szynę do podłożenia pod kółko azymutu, żeby działało na grząskim.
-
4 godziny temu, kubaman napisał(a):
OK, czyli telep może co najwyżej łagodnie opaść jeśli dobrze zrozumiałem.
Opadanie jest dość łagodne (czyt. zdążysz złapać), ale jeśli się go nie powstrzyma, cięższy sprzęt może mocniej stuknąć i coś uszkodzić. Tu przykład, jak to wygląda:
https://www.youtube.com/watch?v=cro59ERtwrY
(Zaradzający temu automatyczny hamulec jest m.in. w iOptronach HAE).
-
2 godziny temu, Michal_IAUZ napisał(a):
W naszej stacji w ZG używamy kamer które idą po koncentryku i na końcu mamy konwertery na usb. To rozwiązuje problem odległości kamera-komputer.
Można to również osiągnąć z kamerami z interfejsem Ethernet (GigE) i obsługą PoE (mam taką starszą Blackfly od Point Grey, obecnie FLIR).
-
Dla ludzi z laptopami: starego laptopa zdarzało mi się zostawiać otwartego na mrozie dłuższy czas, pokrywa i ekran czasem zaczynały pokrywać się szronem. Nic mi się nigdy nie zwarło, ale obecny komputer otwieram w takich warunkach najwyżej na parę minut, potem jest zamknięty ze złożonym ręcznikiem na wierzchu.
-
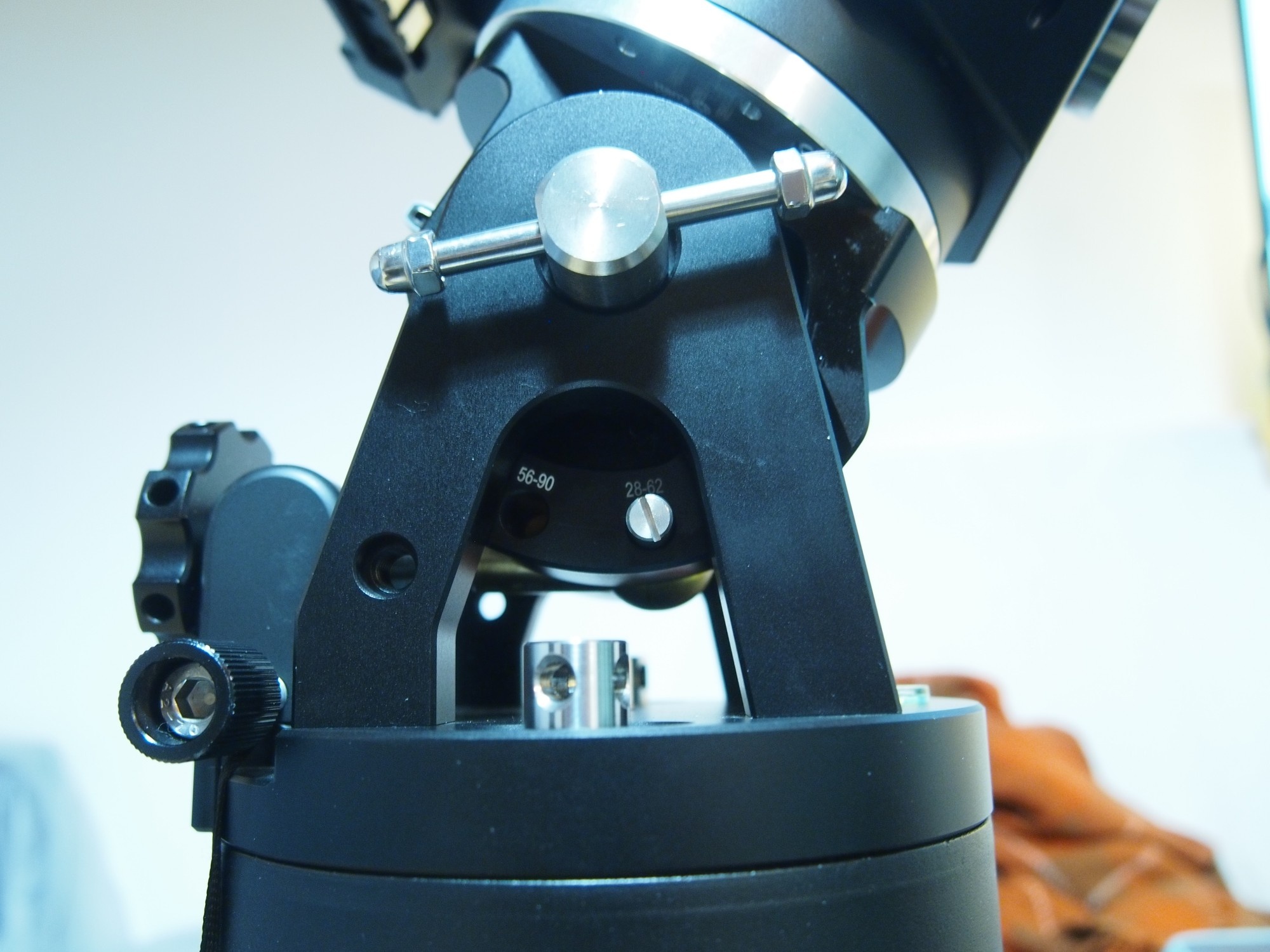
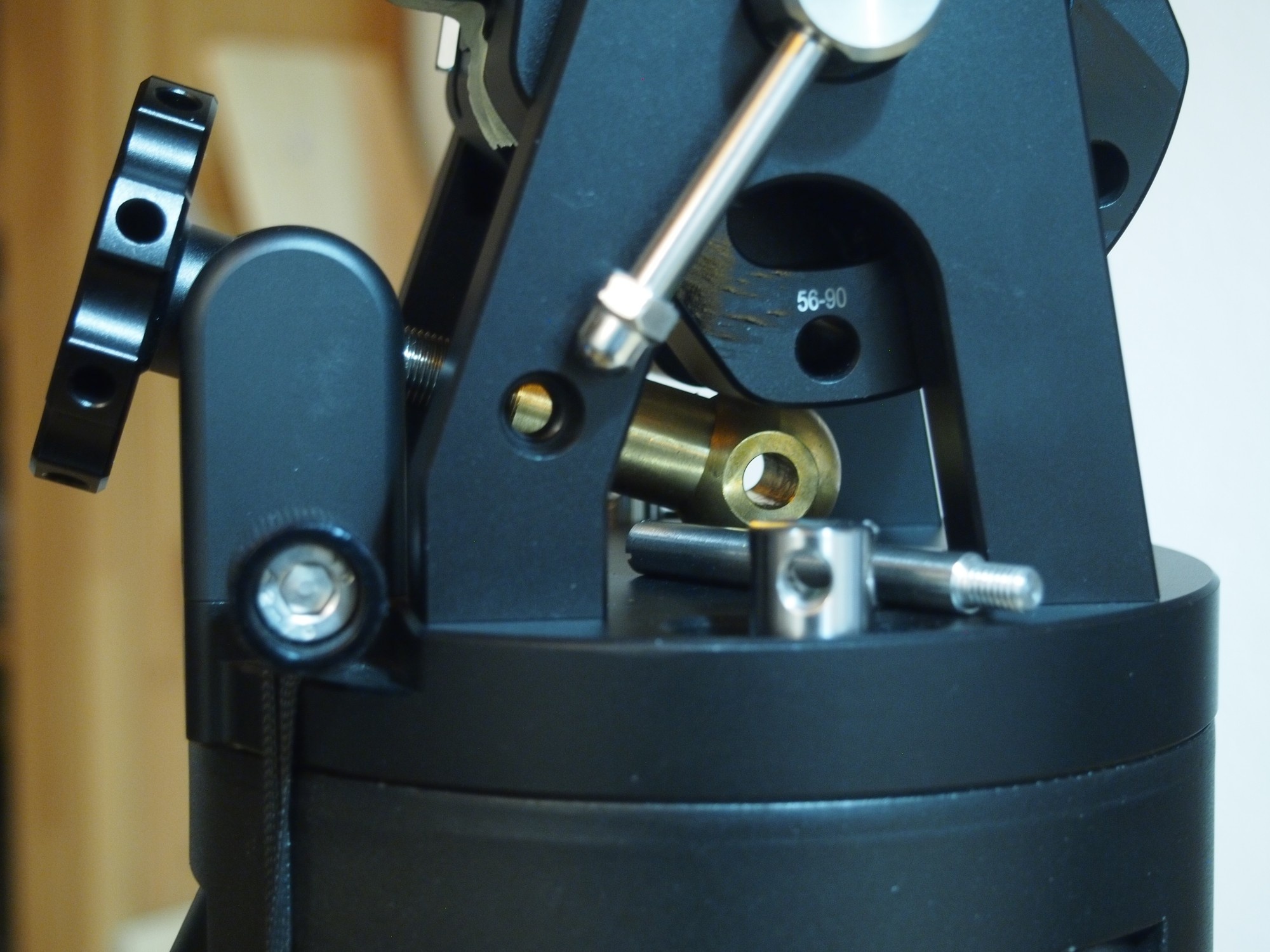
W HEQ5 okablowanie i gniazda zewnętrzne mieszczą się w centralnej części głowicy, więc osiami można kręcić do woli. W iOptronie oczywiście nie, bo wszystkie 3 części głowicy mają gniazda i są ze sobą połączone. Sprawdziłem, że obydwie osie mają zakres obrotu co najmniej ±180° od pozycji zerowej. Nie jest jasne, co się stanie w razie „przekręcenia” (w instrukcji nie napisano); wg wzmianek na CloudyNights montaże miewają fizycznie ograniczniki, albo po prostu wiązki kabli wypną się z wewnętrznych gniazd.
Na próbę przestawiłem montaż w tryb AA; w tym celu trzpień łączący głowicę z pokrętłem elewacji przekłada się do sąsiedniego otworu:
I gotowe (trzeba też przełączyć w tryb AA pilotem):
-
Tu nie ma ślimaków ani sprzęgieł
Luzów na osiach nie wyczuwam. Zamówiony przez stronę iOptrona, bo Teleskop-Express wciąż odwleka dostępność (już chyba 3 razy przesuwali o miesiąc).
-
Wg instrukcji obsługi tracking może dojść maks. do 15° poza południk, potem do wyboru zatrzymanie albo flip (co byłoby dla mnie trochę irytujące, bo dotychczas przy kilkugodzinnych sesjach słonecznych nie robiłem flipa) — ale jednak nie, w pilocie da się ustawić do 89° i faktycznie, do tylu dochodzi.






Weryfikacja dwuetapowa na forum?
w Sprawy techniczne
Opublikowano
Mnie też podoba się opcja dobrowolnego włączenia. Przy ogłoszeniach giełdowych forum mogłoby dodawać znacznik/odznakę "konto ofertodawcy zweryfikowane 2FA". Wtedy potencjalni kupujący sami ocenią ryzyko, czy chcą kupować bez tego.