WielkiAtraktor
-
Postów
1 661 -
Dołączył
-
Ostatnia wizyta
-
Wygrane w rankingu
8
2 obserwujących


Osiągnięcia WielkiAtraktor
4,4 tys.
Reputacja
-
Weryfikacja dwuetapowa na forum?
WielkiAtraktor odpowiedział(a) na Paether temat w Sprawy techniczne
Mnie też podoba się opcja dobrowolnego włączenia. Przy ogłoszeniach giełdowych forum mogłoby dodawać znacznik/odznakę "konto ofertodawcy zweryfikowane 2FA". Wtedy potencjalni kupujący sami ocenią ryzyko, czy chcą kupować bez tego. -
Automatyczne śledzenie samolotów
WielkiAtraktor odpowiedział(a) na WielkiAtraktor temat w ATM, DIY, Arduino
Dzięki! Ogarniałem bez pośpiechu, jakieś 4 miesiące na to zeszły Od strony technicznej: użyłem mojego ulubionego (od 2017 r.) języka Rust (acz równie dobrze można by to napisać w Pythonie itp.); strona obliczeniowa nie wykracza poza poziom szkoły średniej (parę iloczynów skalarnych i wektorowych); samo podążanie za celem to najprostszy regulator proporcjonalny (zob. kod), czyli P z PID (jako że pasażerskie na przelotówce gwałtownych manewrów nie robią). Ee, to nie radar pasywny (który można zrobić z kilku SDRów), żeby ITAR zabraniało 😁 Po centrowaniu manualnym montaż sam podąża — ale że odchyłka się zmienia, po chwili znów trzeba centrować. W praktyce non-stop wykonuję (możliwie) delikatne ruchy joystickiem, żeby mieć w środku kadru kamery głównej. Na gamepadzie to dość wygodne. Kolejnym krokiem będzie automatyczna synchronizacja na podst. obrazu, jak piszesz (mam to już w Vidoxide, na razie do autoguidingu na ciałach niebieskich, będę musiał to jakoś pożenić). W konfiguracji azymutalnej nic nie trzeba flipować, jako że teleskop celuje tylko w [0°; 90°) nad horyzontem. Ale dodam opcję pracy z montażem pochylonym (tylko muszę to rozkminić geometrycznie), żeby osobliwość (biegun) nie wypadała w zenicie (czyli tam, gdzie najlepiej się foci), bo wtedy oczywiście wymagana szybkość obrotu osi azymutu dąży do nieskończoności. Już parę razy tak miałem, że jak na złość przelatywało coś prawie dokładnie nad głową i montaż nie nadążał. Zestaw z refraktorem 90/660 mm: Z GSO RC8: Tu jeszcze krótki filmik z działania programu plane-tracker (odtwarzam na nim nagraną uprzednio sesję; ze wzgórza o ok. 600 m wys. wzgl. złapałem sygnał ADS-B nawet z ~480 km): plane-tracker.mp4
-
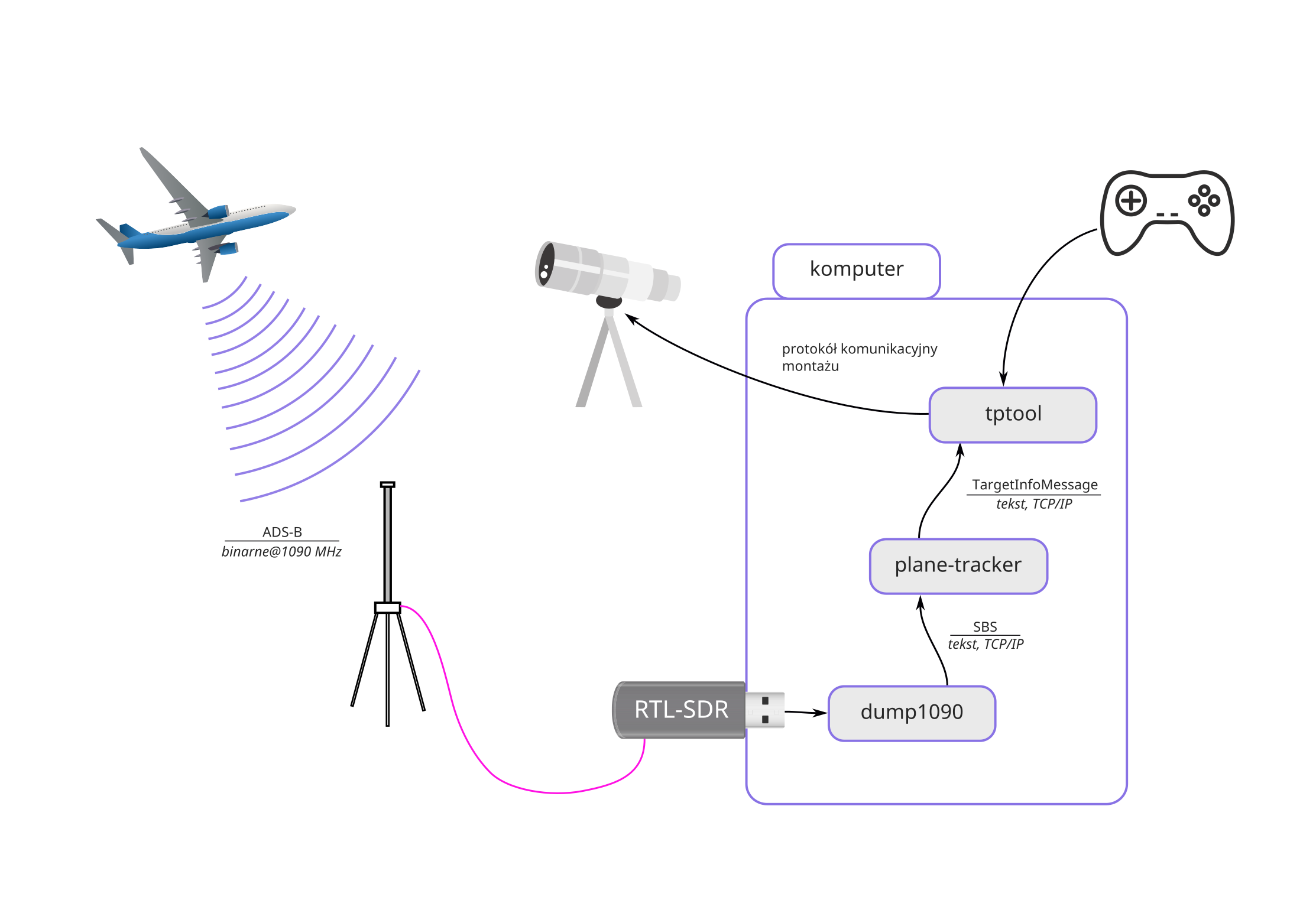
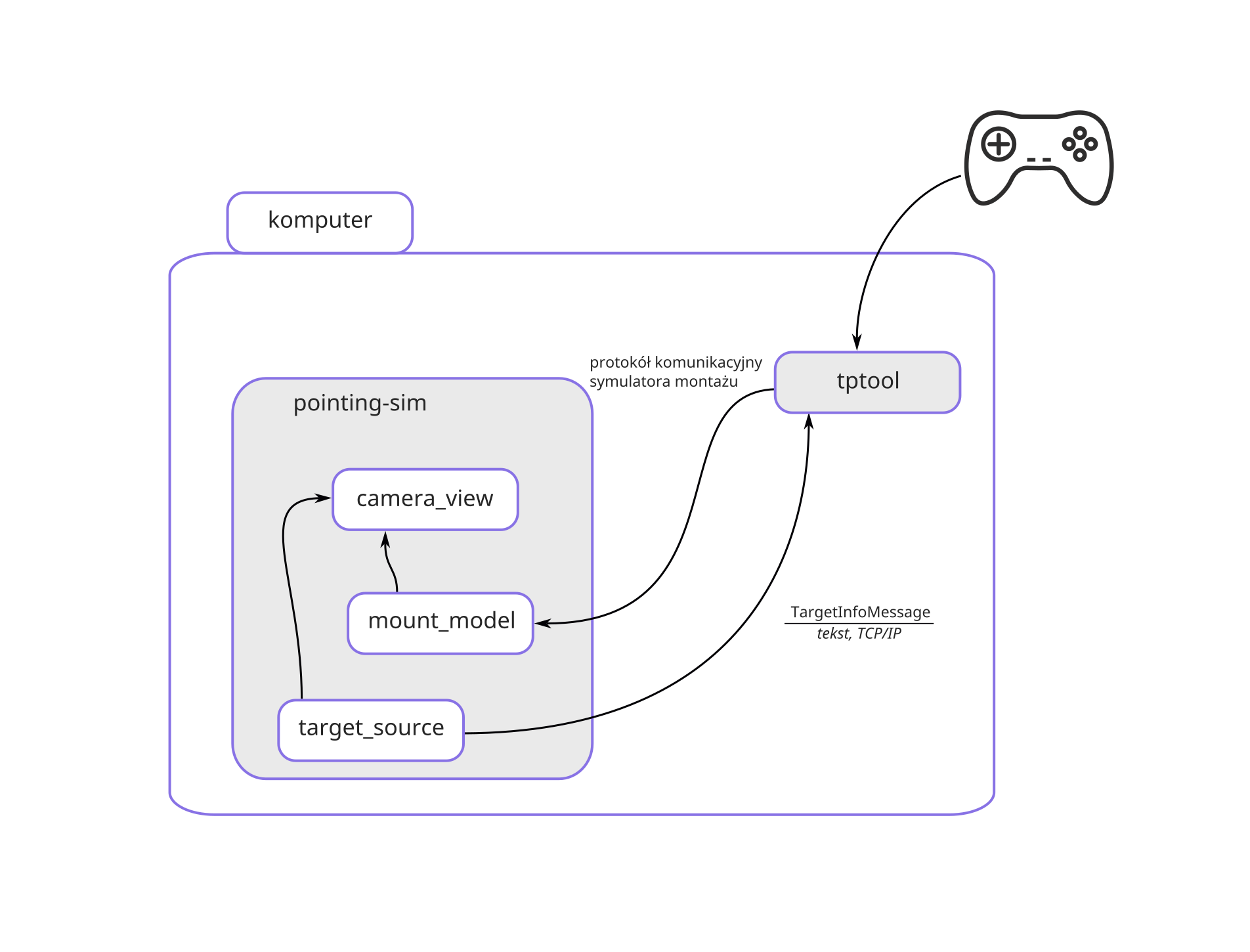
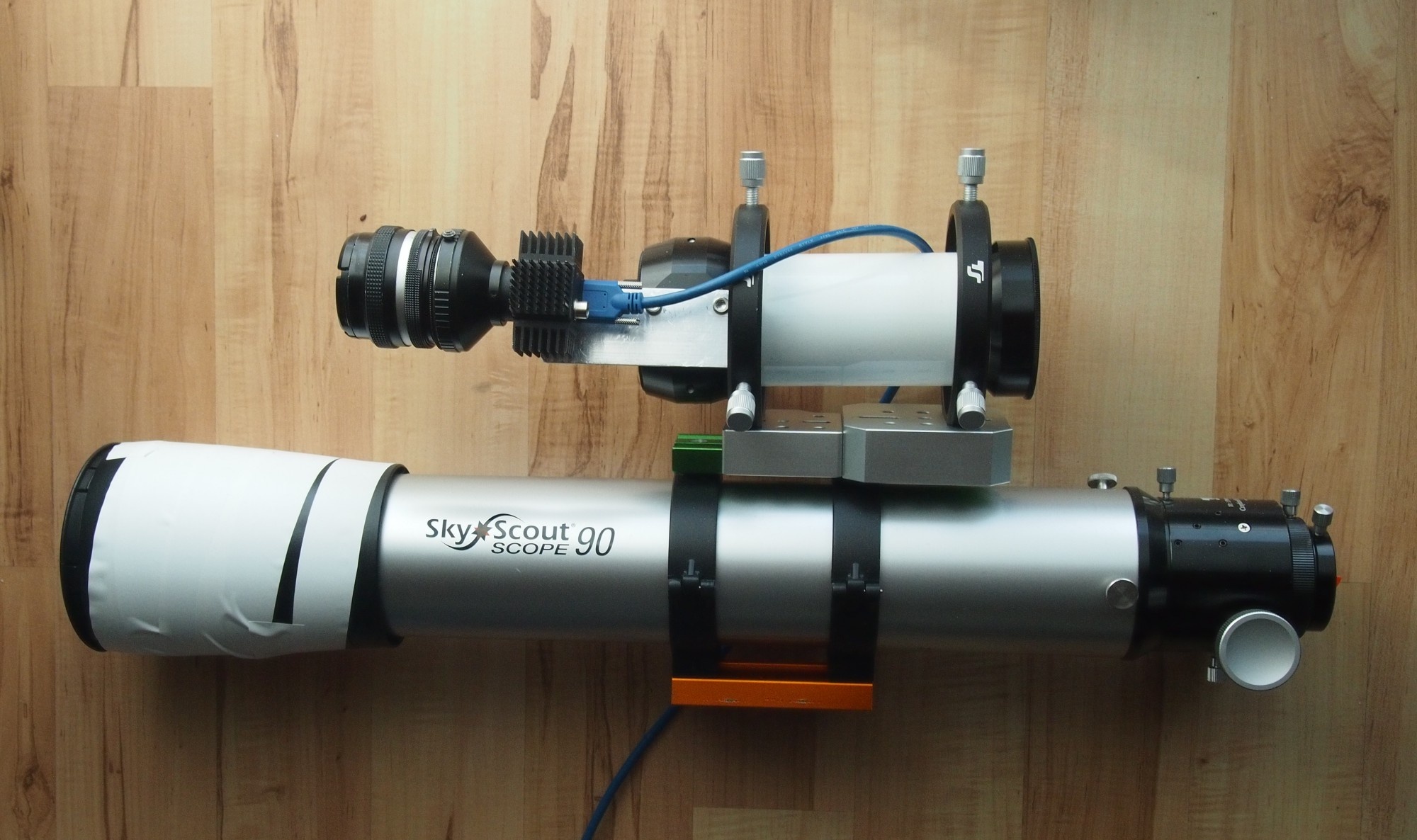
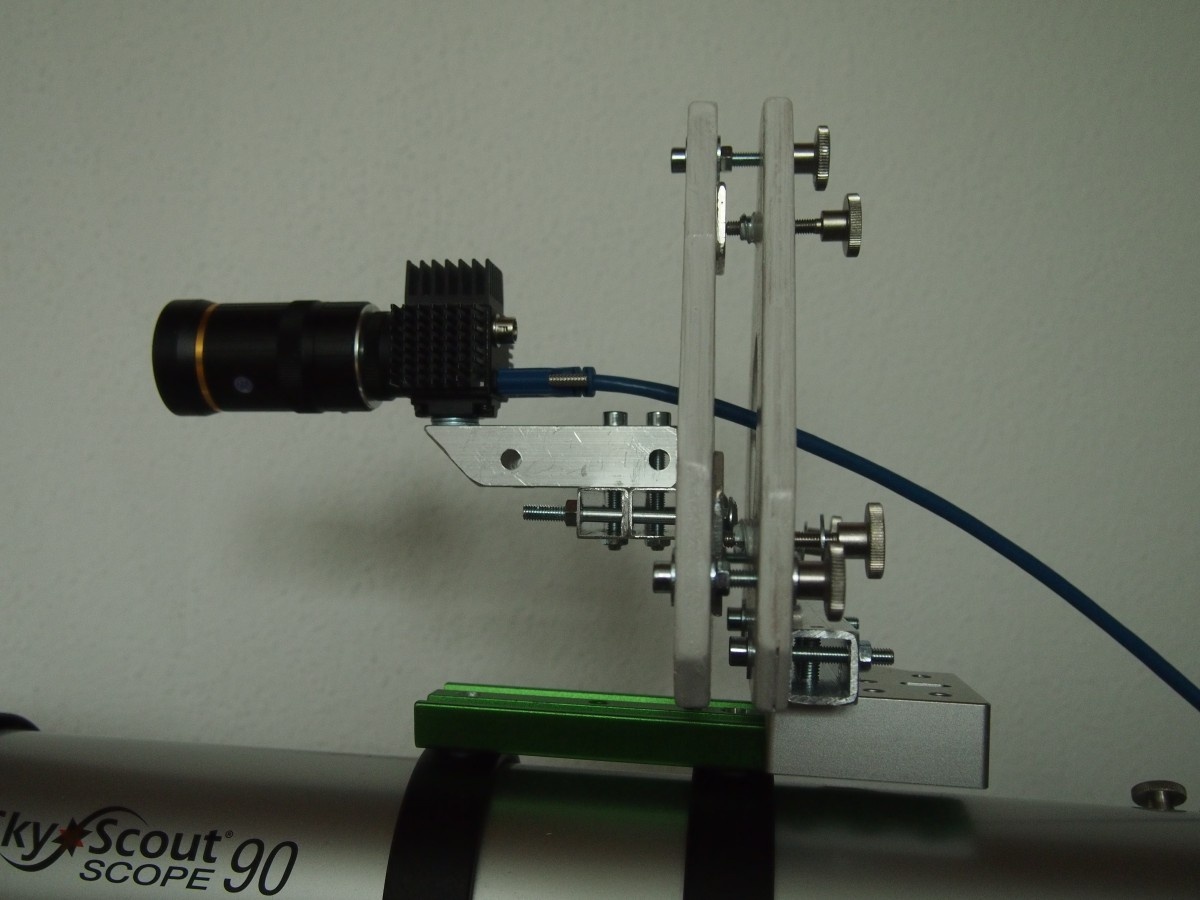
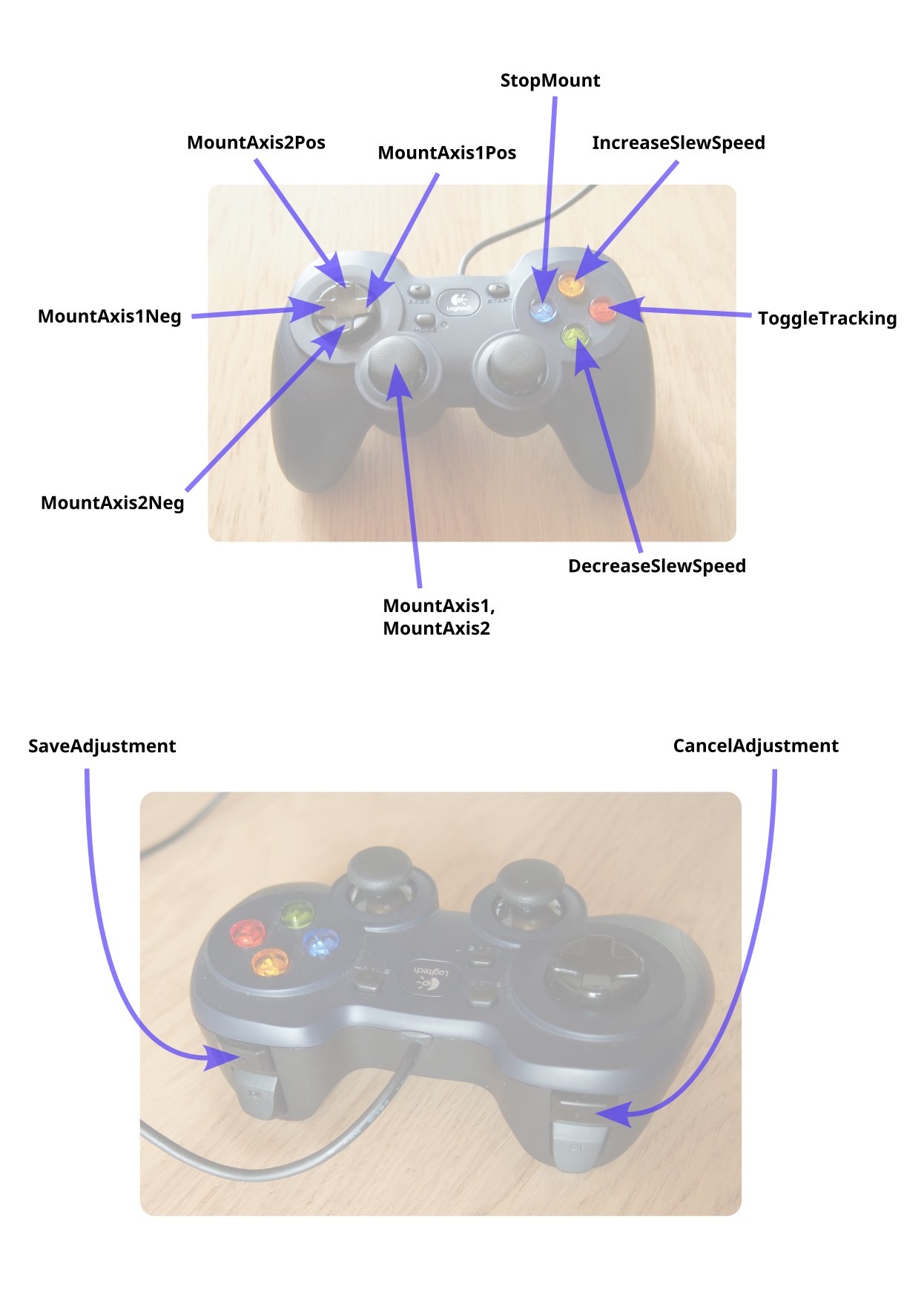
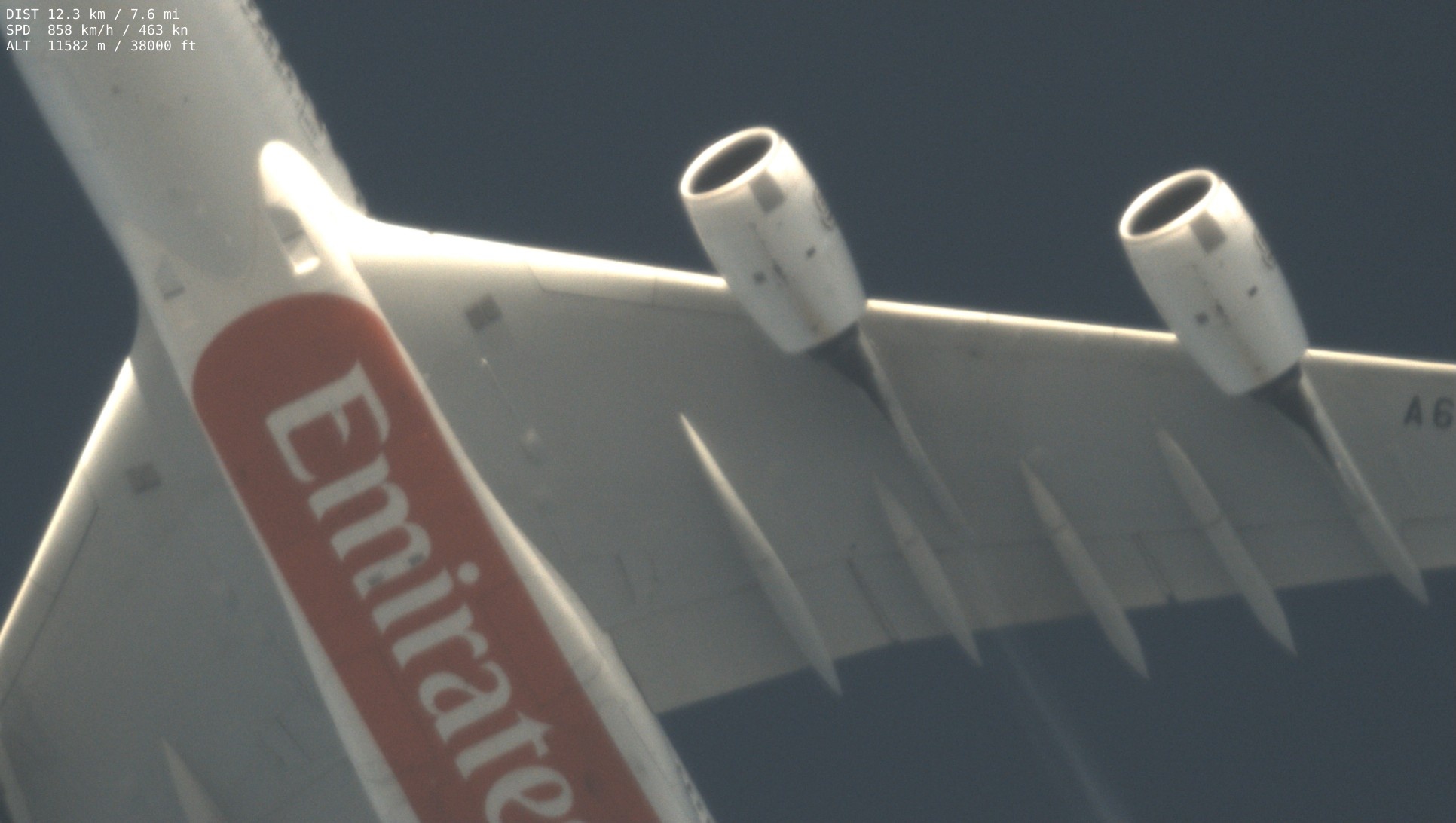
Od czasu pierwszych prób z fotografowaniem samolotów na wysokości przelotowej przez teleskop chodziło mi po głowie, żeby proces zautomatyzować - oto wyniki. Na mój nowy zestaw składają się: - odbiornik ADS-B (non-stop wysyłane przez statki powietrzne dane o parametrach lotu): RTL-SDR na USB (R820T2) z anteną zewnętrzną (zaopatrzyłem się w ten zestaw) - montaż iOptron HAE69B, umożliwiający płynną zmianę prędkości obydwu osi w pełnym zakresie (więcej o tym poniżej) - Plane Tracker: program wyświetlający pozycje (i in.) okolicznych samolotów - TPTool: program do sterowania montażem i płynnego śledzenia ruchomego celu na sferze niebieskiej Ww. programy są mojego autorstwa; kod źródłowy i wersje zbudowane dla Windows do pobrania pod powyższymi odnośnikami. Wszystko współpracuje ze sobą następująco: Oczywiście ciężko byłoby nad tym pracować, gdybym musiał wszystkie testy i próby przeprowadzać pod niebem (zwłaszcza w okresie zimowym) — dlatego stworzyłem jeszcze symulator (pointing-sim), który zastępuje teleskop, kamerę, montaż i źródło danych o celu (samolocie): Przykładowa sesja z symulatorem (TPTool + gamepad + pointing-sim) pointing-sim_s.mp4 Więcej informacji o obsłudze programów można znaleźć w plikach README i samouczku. W praktyce zestaw nie celuje w wybrany samolot idealnie (wg logów TPTool odchyłki są po 2-3 stopnie), zapewne przez niedokładnie zorientowanie montażu i/lub rozjazd czasowy komunikatów ADS-B. Dlatego używam guidera (obiektyw 50 mm + kamera 1/3"), żeby wycentrować cel w kamerze głównej za pomocą kontrolera do gier. Na początku musiałem poskładać coś na szybko (to białe to tuba Lunta 50): ale potem kupiłem mniejszy obiektyw C-mount i zbudowałem justowalną platformę: U siebie akcje kontrolera (Logitech F310) mam skonfigurowane następująco (szczegóły w samouczku): (pod pozostałe 2 analogowe spusty podepnę jeszcze sterowanie DreamFocuserem mini, tylko muszę zaimplementować obsługę). Przykładowe nagrania (kamera ASI 462MC): - refraktor 90/660 mm: - GSO RC8 (200/1600 mm) - słaba przejrzystość, ale niezły seeing: Drgania i „pływanie” obrazu w drugim wideo to najwyraźniej nakładanie się wibracji zestawu i rytmu odczytu migawki postępowej. Możliwe, że to przez fakt założenia pręta z przeciwwagą (HAE69B przy takim obciążeniu jeszcze jej nie potrzebuje, sprawdzę to następnym razem; bądź przymocuję jakieś małe worki z piaskiem dla stłumienia), bo wiatru praktycznie nie było. UWAGI Obecnie TPTool obsługuje tylko montaże iOptrona (bezpośrednie połączenie szeregowe) posiadające tzw. „special mode” (płynna zmiana prędkości w pełnym zakresie i odczyt bieżącej pozycji dla obydwu osi), tj. serie HAZ, HAE i AZMP. By dodać inny montaż, należy zaimplementować ten interfejs. Narzędzie dump1090 do dekodowania danych ADS-B dostępne jest np. w repozytoriach dystrybucji Linuksa. Wersja zbudowana dla Windows: link.
-
Przetestowałem śledzenie samolotów z GSO RC8... będzie mi potrzebny większy sensor.😄

- Pokaż poprzednie komentarze 2 więcej
-
-
Soft do nakierowania zgrubnego i potem ręczne korekty joystickiem (tutaj o tym wspomniałem; jutro opublikuję dokładniejszy opis).
-

-
Stworzenie Dragonfly również było m.in. tym motywowane, jak wspomniano w starszym poście.
-
Kamery wykorzystywane w stacjach bolidowych
WielkiAtraktor odpowiedział(a) na MateuszW temat w Dyskusje o sprzęcie
Mamy już MagicLantern dla Canonów - można np. nagrywać wideo w postaci RAW (na kartę - ciekawe, czy jakiś live streaming na zewnątrz po USB dałoby się zrobić). -
Naprawa statywu LT1 domowym sposobem.
WielkiAtraktor odpowiedział(a) na Paweł 103 temat w ATM, DIY, Arduino
Dobry pomysł, też muszę naprawić swój LT1. Myślicie, że wystarczyłoby bezpośrednio nagwintować otwór na M8 w takim profilu 5 mm? Zmieściłyby się 4 zwoje. -
Oto on: Dokładny opis pisze się
-
Początki astro-foto
WielkiAtraktor odpowiedział(a) na Proksima Centauri temat w Dyskusje o astrofotografii
Na zupełny początek DS proponuję też łapanie Drogi Mlecznej ze statywu; wychodzi nawet z podstawowym "kitowym" obiektywem, sam kiedyś spróbowałem (potem zostałem jednak słonecznikiem/planeciarzem). -
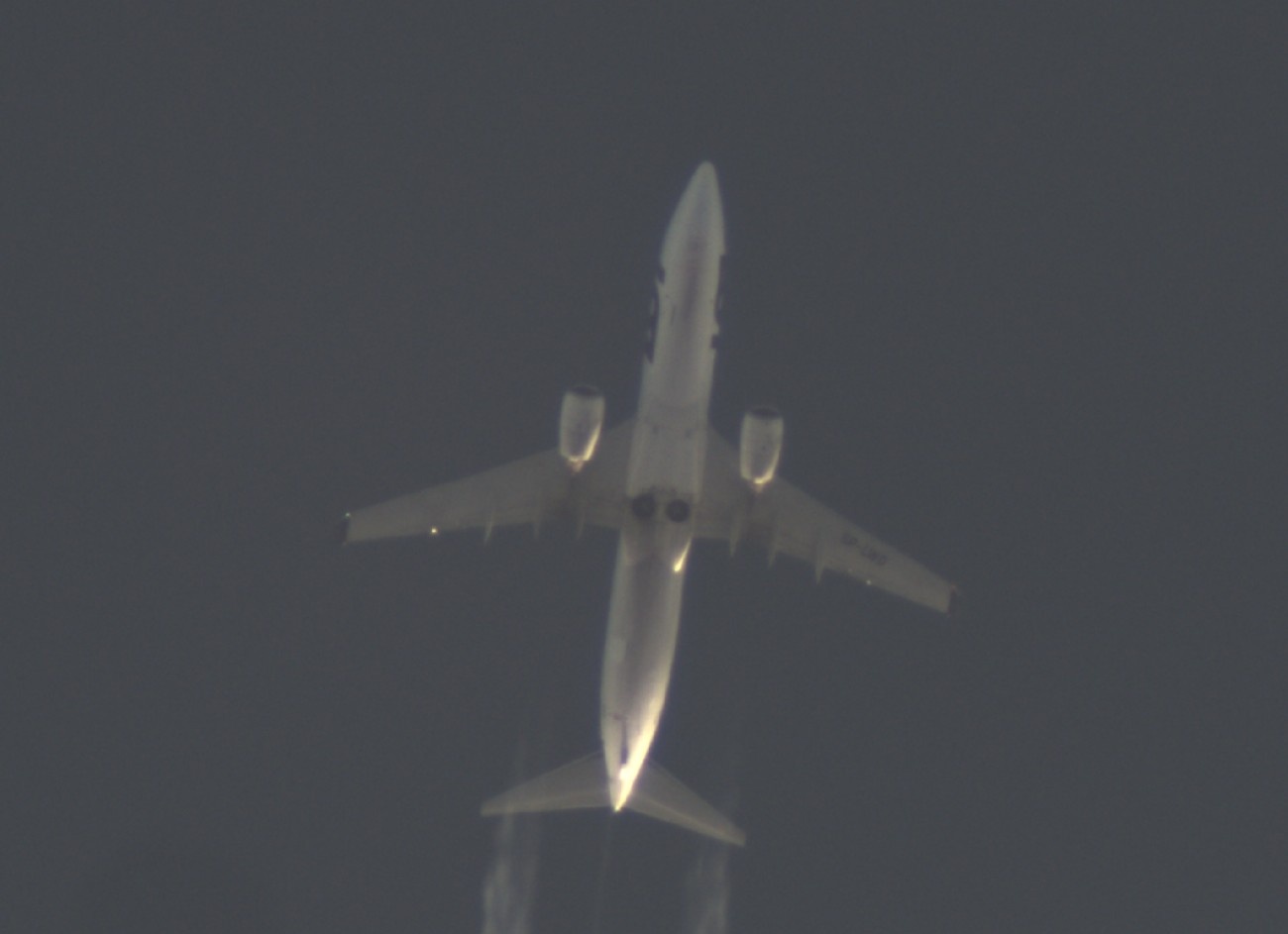
Seeing i chmury nadal nie rozpieszczają, ale przynajmniej przetestowałem delikatniejsze ręczne sterowanie: Achromat 90/660 mm, ASI462MC. Niech tylko przyjdą lepsze warunki, to zawieszę na montażu coś większego.
-
Co mogą zdziałać, to wiemy, ale z wytwarzaniem wciąż kiepsko; za hasłem Terahertz radiation na Wikipedii:
-
Czy ktoś posiadający ASI585MC mógłby sprawdzić, ile fps wyciąga dla ROI 1920x1080 (w trybie ADC 10-bit/RAW8)? Wg dok. ZWO tylko 91 fps (tyle samo, co z ADC 12-bit/RAW16), ale bliźniaczy Player One Uranus-C ma 187 fps w RAW8 (stąd podejrzewam pomyłkę w dok. ZWO).
-
Temat pokrewny: SCT ze zbitym korektorem przerobiony na Dall-Kirkhama.
-
Możecie ocenić setup "na start przygody" z astrofoto?
WielkiAtraktor odpowiedział(a) na motowilk pytanie w Pierwsze Kroki: Sprzęt
Jeszcze uwaga co do „otwartoźródłowości” ZWO: podobnie jak u innych producentów, dostępne jest SDK do obsługi kamer, tak że można je wykorzystać np. ze swoim oprogramowaniem (bez problemu używam swojej ASI z Vidoxide pod Linuksem).- 59 odpowiedzi
-
- 2
-

-
- william optics
- pleidaes 68
- (i 4 więcej)
-
Sesja nr 2, tym razem dodałem guider i mogłem spokojnie naprowadzić na cel (zamiast szukać samolotu na ślepo jak ostatnio po zgrubnym wycelowaniu). Niebo bardzo mgliste i kiepski seeing, ale coś wyszło. Achromat 90/660 mm na pełnej ogniskowej (poprzednio ok. 350 mm z reduktorem), ASI462MC: Dłuższa składanka (naniesiono dane o celu z ADS-B): W zwolnionym tempie (ok. 4,6x, 137 -> 30 fps): rec11_sm.mp4 Widok z guidera (obiektyw foto 55 mm): guider.mp4 Muszę się jeszcze nauczyć delikatniej operować joystickiem (i podpiąć zmianę szybkości tych korekt pod któryś przycisk na kontrolerze).