

MateuszW
-
Postów
9 964 -
Dołączył
-
Ostatnia wizyta
-
Wygrane w rankingu
41
Typ zawartości
Profile
Forum
Blogi
Wydarzenia
Galeria
Pliki
Sklep
Articles
Market
Community Map
Odpowiedzi opublikowane przez MateuszW
-
-
7 minut temu, JaLe napisał:
To ja jeszcze poproszę wersję skrótową, bo za Chiny nie chce mi się tego czytać :/
Cóż, zrobię podsumowanie wad i zalet, ale raczej streszczenia nie będzie. Możesz wybrać interesujący Cię temat i czytać kawałek. Innej opcji nie widzę
") Nie myślałem, że wyjdzie mi taki wielki kawał tekstu, ale cóż poradzić. Opisałem tu wszystko, o czym chciałbym wiedzieć sam zanim dokonałem zakupu...
Nie myślałem, że wyjdzie mi taki wielki kawał tekstu, ale cóż poradzić. Opisałem tu wszystko, o czym chciałbym wiedzieć sam zanim dokonałem zakupu...
-
 4
4
-
-
- Ta odpowiedź cieszy się zainteresowaniem.
- Ta odpowiedź cieszy się zainteresowaniem.
Podsumowanie
Jako uzupełnienie warto oglądnąć film i zapoznać się z wątkiem Adama:
Jeśli chodzi o rodzinę iOptrona, to mamy do wyboru wersję EC, z enkoderem i teoretycznym PE 0,3", oraz P, która ma deklarowane PE <10". Zakładałbym, że wersja EC ma przekładnie wzięte z P, choć teoretycznie mogłaby mieć jakieś gorsze, bo enkoder mógłby z nimi sobie poradzić. Wersja P ma prawdopobonie lepsze przekładnie, niż np SW, którego PE potrafi sięgać 15-20". Poprzednikiem CEM było ZEQ, w którym chyba nie deklarowali żadnej dokładności. ZEQ wyróżniało się też innymi silnikami - DC z dodatkową przekładnią planetarną. Pozostałe rozwiązania mechaniczne wyglądają identycznie, ale coś mogło umknąć mojej uwadze.
Podsumowując, iOptron CEM25EC to kawał porządnego montażu. Jakość wykonania jest powyżej chińskich standardów. Konstrukcja jest przemyślana i dopracowana, zarówno mechanicznie, jak i w software. Montaż spełnia wszystkie kryteria, jakie możemy wymagać od mobilnego montażu - oferuje świetne prowadzenie bez guide, przy małych rozmiarach, niskiej wadze, dużym udźwigu i małym poborze prądu.
Jutro dopiszę jeszcze krótkie podsumowanie wad i zalet, tymczasem zapraszam do komentowania
Wyszedł mi kawał tekstu, mam nadzieję, że będą wytrwali, który przeczytają całość
Mam nadzieję, że udało mi się tu zawrzeć sporo wartościowej wiedzy. Montaż nie jest zbyt popularny w Polsce i w internecie praktycznie brak informacji w naszym języku. Zastanawiam się, czy poza mną i egzemplarzem z wątku Adama (którego właściciela poznałem ), ktoś jeszcze ma go w Polsce...
KONIEC
-
18
-
 9
9
-
- Ta odpowiedź cieszy się zainteresowaniem.
- Ta odpowiedź cieszy się zainteresowaniem.
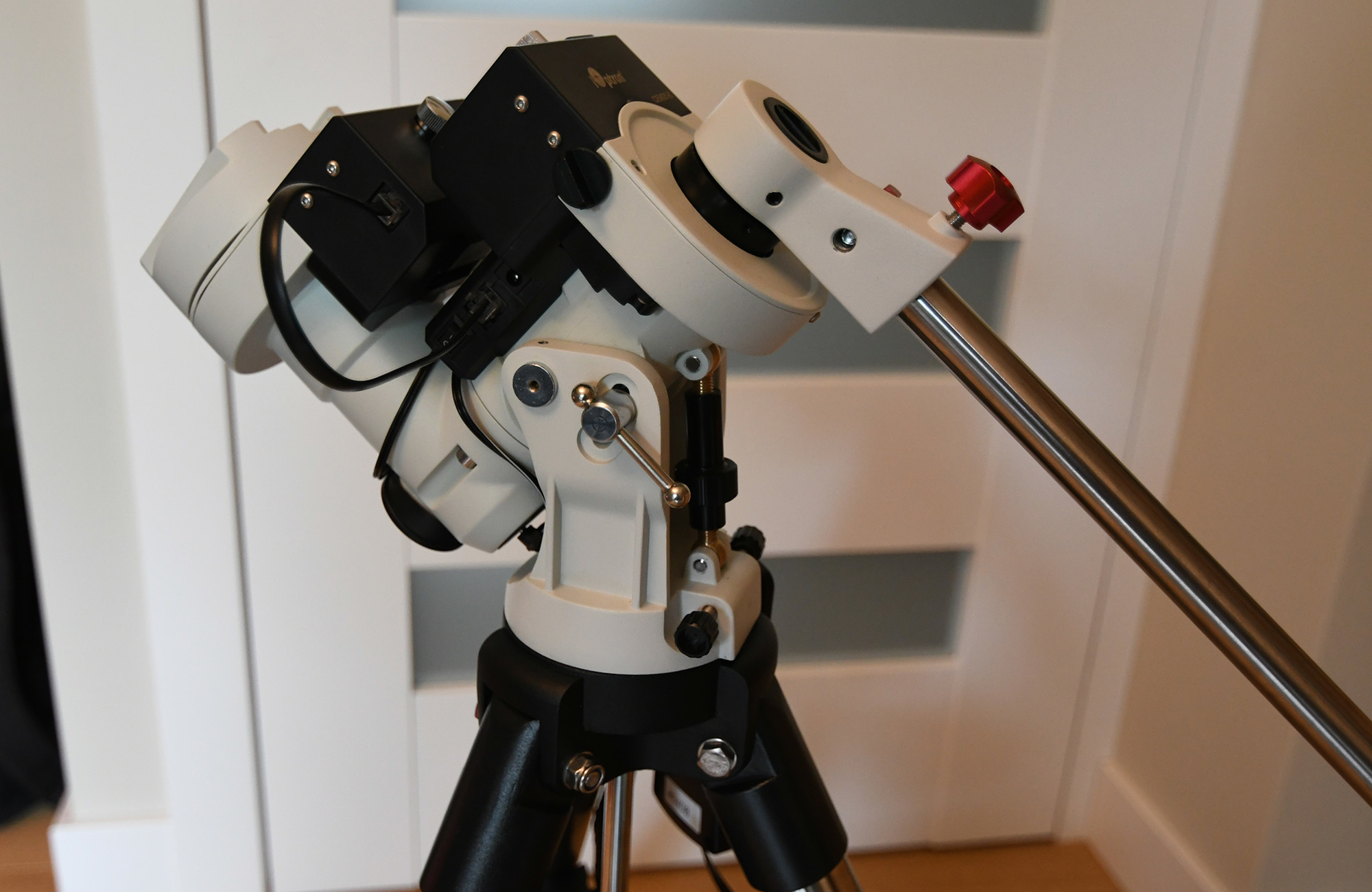
Przekładnie i mechanika
Łożyskowanie montażu jest na najwyższym poziomie. Po odblokowaniu, osie chodzą gładko jak pupa niemowlaka. Jest idealnie. Oś obraca się po minimalnym dotknięciu, opór prawie zerowy. Żadnych luzów na łożyskach. Co ciekawe, goły montaż z samym prętem jest już wyważony, nic go nie ciągnie na żadną stronę (no dobra, te czerwone śruby przy siodełku przeważają oś Dec
 ).
).
Montaż działa niezwykle cicho. Przy pełnej prędkości ma 1/3 głośności NEQ6 po paskowaniu. Nie ma żadnych zgrzytów, jęków i pisków.
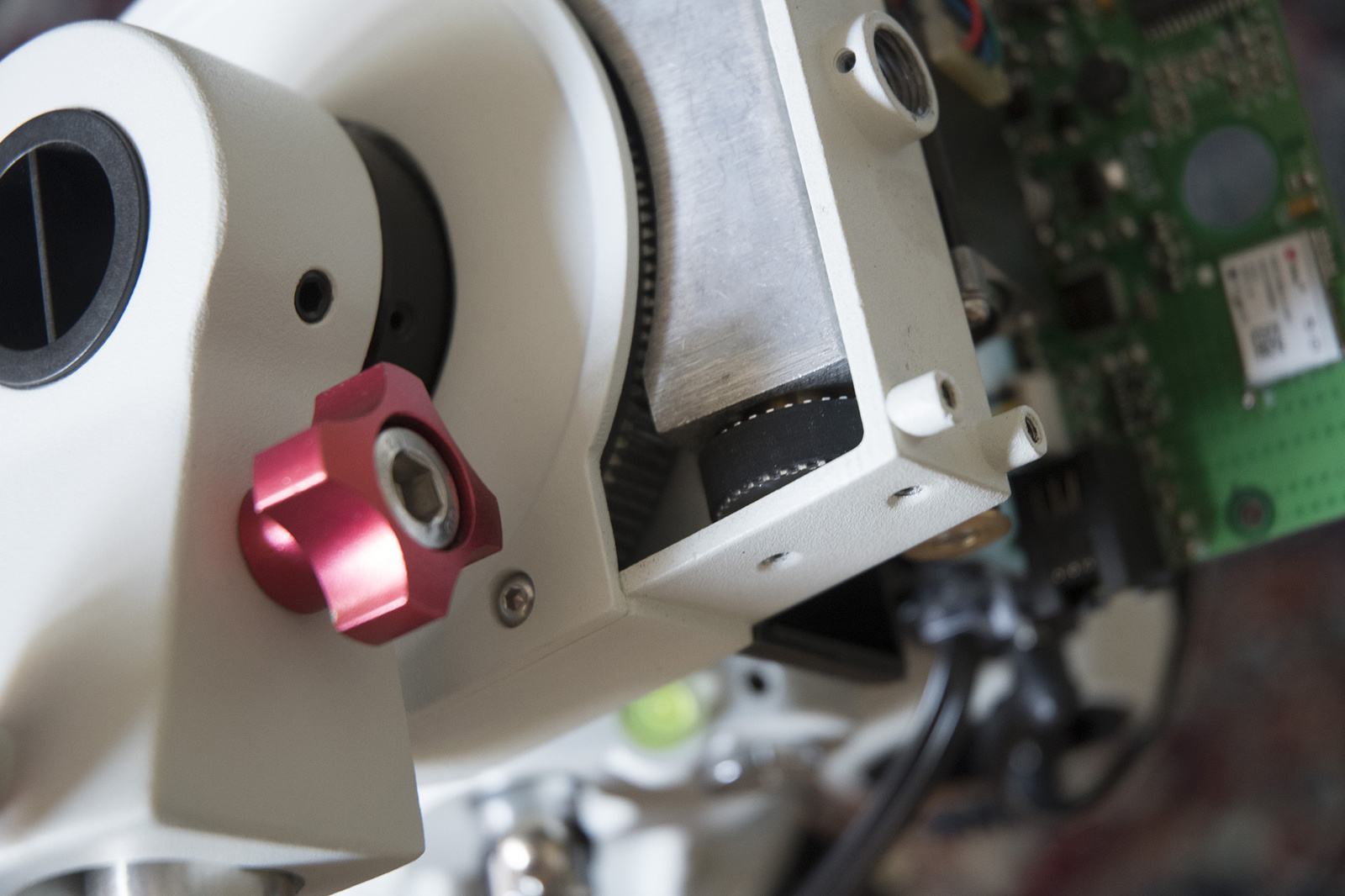
Rozsprzęglanie osi zrealizowano w nietypowy sposób. Mamy tu mechanizm odsuwania modułu napędowego (silnika ze ślimakiem) od ślimacznicy. Rozsprzęglenie następuje więc na głównej przekładni. Większość montaży ma nieruchomą przekładnię, a sprzęgło to cierna blokada, która umożliwia rozłączenie ślimacznicy z osią. Tak więc zasadniczo w iOptronie można powiedzieć, że to prostszy mechanizm. Taki NEQ6 potrzebuje do tego ze dwa dodatkowe łożyska głównej osi.
Mechanizm rozsprzęglania posiada również drugą funkcje - docisku ślimacznicy na sprężynie w celu niwelacji luzu. Nie mamy więc tutaj żadnych imbusów do regulacji docisku. Zasada działania tego mechanizmu jest prosta: moduł napędowy ze ślimakiem znajduje się na "zawiasie", na którym może się oddalać i przybliżać. Do ślimacznicy dociska go sprężyna, która znajduje się w srebrnym pokrętle, którym regulujemy siłę docisku. Czarne pokrętło z boku służy do odsunięcia modułu napędowego (podważenia "zawiasu"), co jest możliwe po zwolnieniu sprężyny.
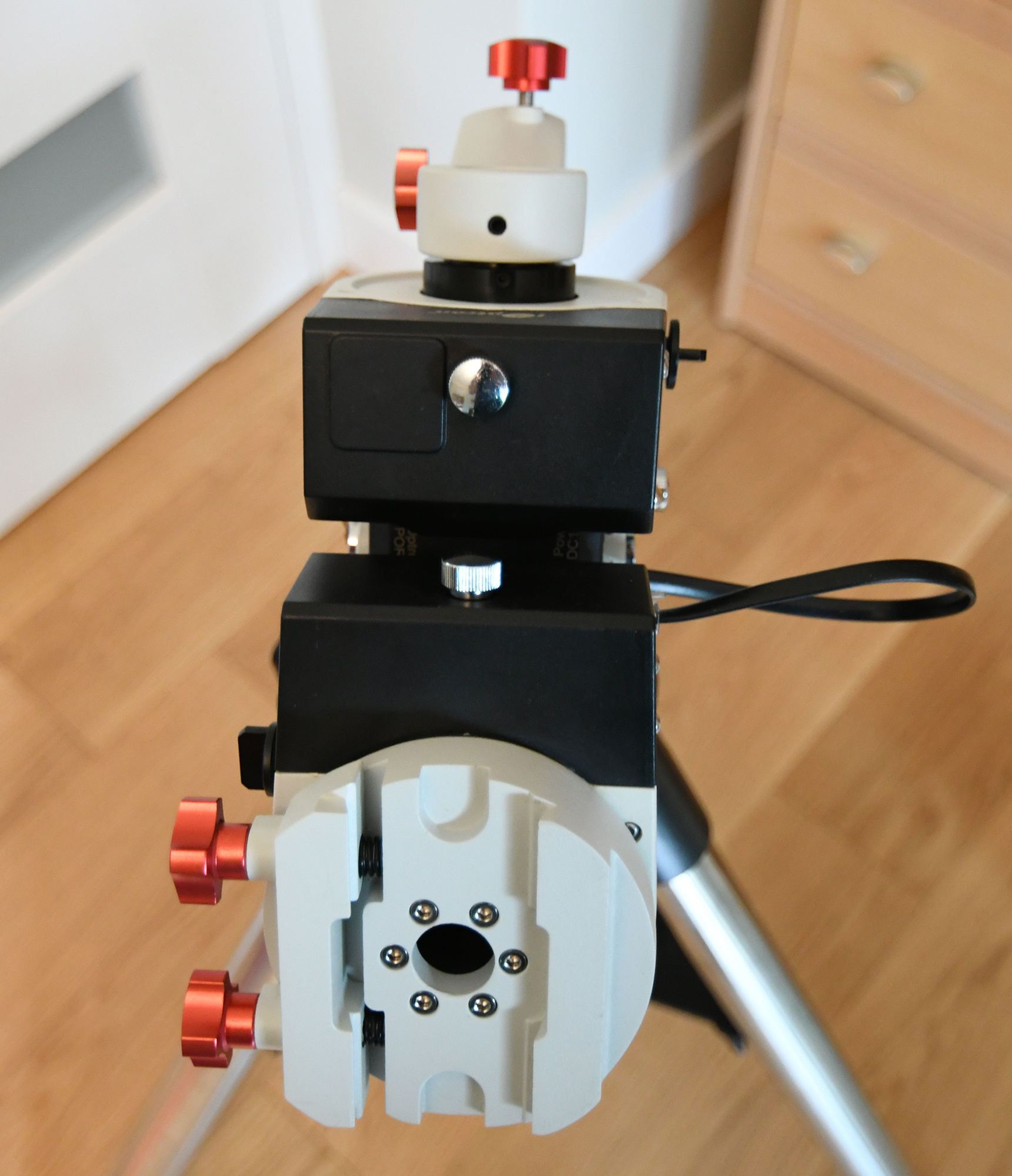
Nie byłbym sobą, gdybym nie rozebrał montażu
Zrobiłem jednak maksymalnie nieinwazyjny przegląd - w zasadzie zdjąłem tylko plastikowe osłony. Nie rozkręcałem osi.
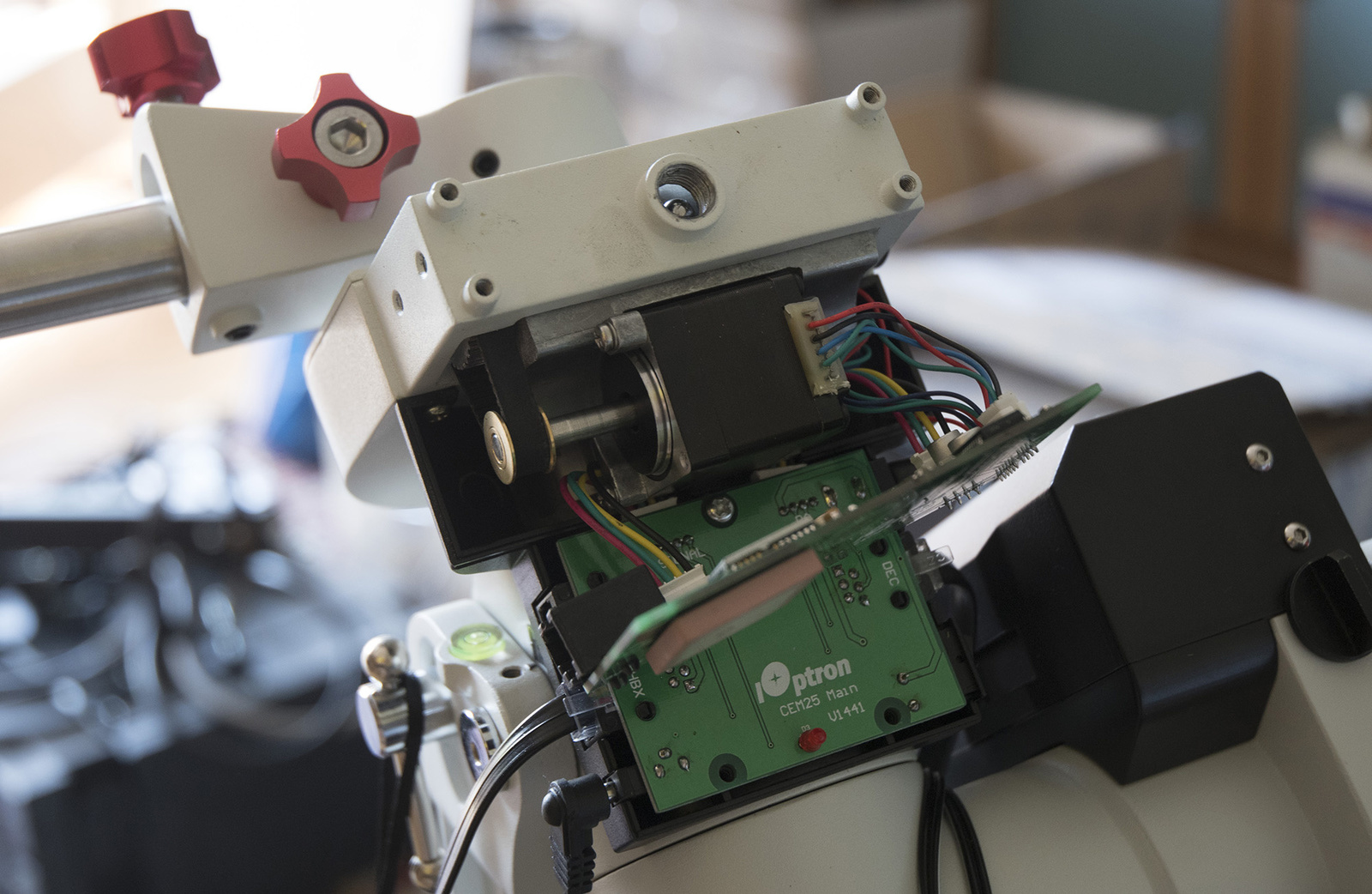
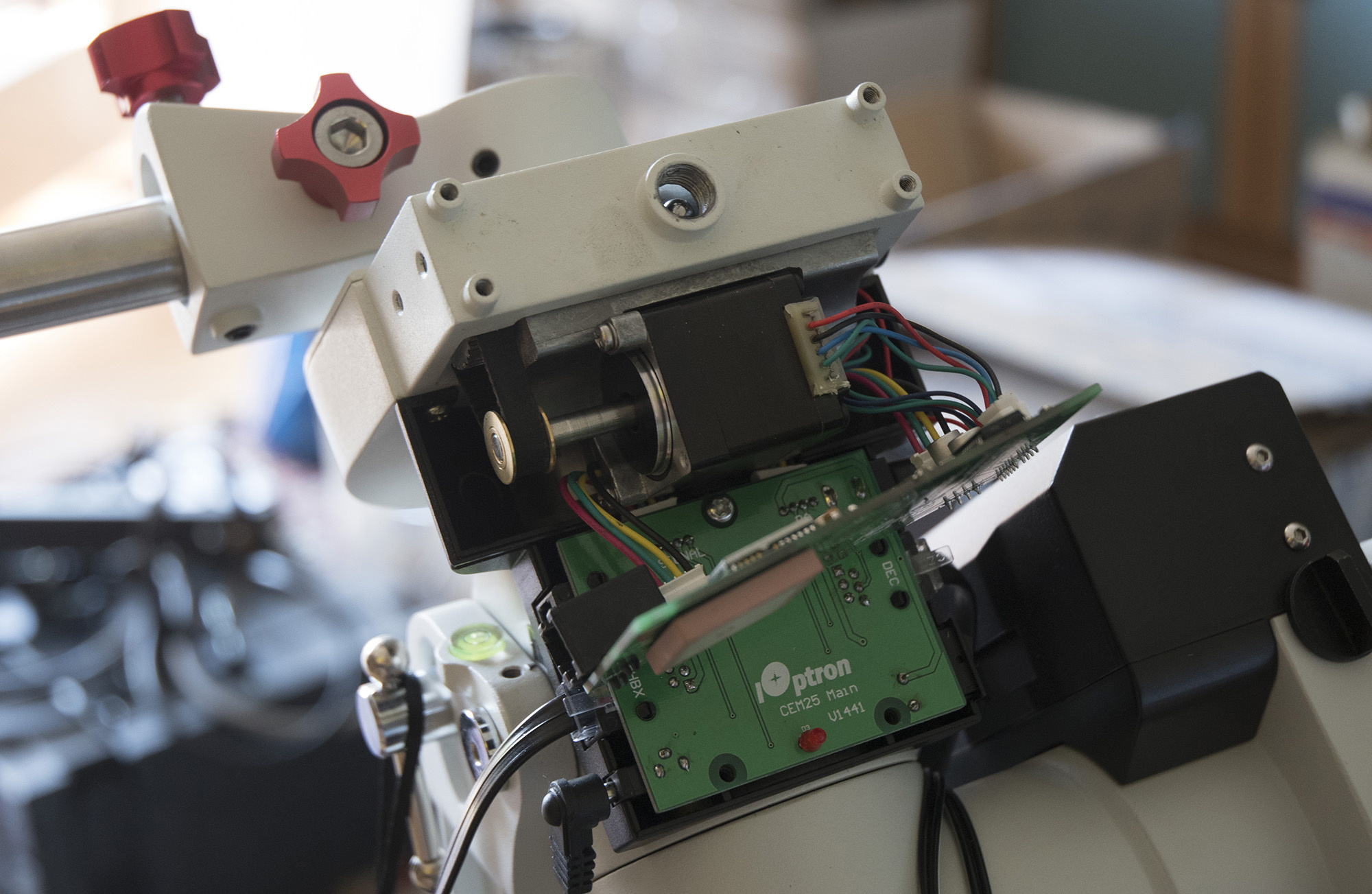
Widzimy, że napęd składa się z silnika krokowego (wg producenta 1,8 stopnia, 128 mikrokroków). Silnik jest dość mały, 50% mniejszy, niż w HEQ5/NEQ6. Stąd zapewne mały pobór prądu. Następnie mamy przekładnię paskową, dość niewielką (nie liczyłem zębów, ale na oko 1:2). No i na końcu przekładnia ślimakowa (88 mm, 144 zęby). RA i Dec są identyczne.
Elektronika montażu jest nowoczesna. Na płytce RA mamy mikrokontroler STM32, oraz driver silnika i moduł GPS. Płytka główna to w zasadzie same złącza. Płytka Dec to klon RA tylko bez GPS. Co siedzi w pilocie nie sprawdzałem, ale zapewne trzeci mikrokontroler. Podejście podobne do SW, czyli 3 niezależne procki. Bo np Meade nie posiada mikrokontrolera w pilocie, wszystkie scalaki są na głównej płytce montażu.
Na przekładni widać cienką warstwę przeźroczystego smaru, zdaje się dobrej jakości. Nie widać żadnych opiłków, jednakże nie rozbierałem tego bardziej.
Dwie rzeczy wymagały niewielkiej poprawy. Odrobinę (ułamek ułamka obrotu) poluzowałem mocowanie mechanizmu rozsprzęglania, dzięki czemu jest mniejszy opór dla dociskającej sprężyny. Fabryczne dokręcenie powodowało, że w RA czasami sprężyna nie mogła docisnąć osi do końca i był widoczny luz. Jak się kilka razy luzowało i dociskało sprężynę to udawało się dobrze docisnąć, więc dało się żyć, ale była to niedoróbka. Moja zmiana dokręcenia śruby była na prawdę subtelna, więc chińczyk tylko minimalnie spartolił robotę
Drugą rzeczą, którą poprawiłem było naprężenie paska Dec. Brakowało mu może 0,2 mm. Był niby naprężony, ale przy zmianie kierunku lekko się odkształcał, co powodowało luz (widoczny przy guide). Poluzowałem dwie śrubki trzymające silnik, naprężyłem i dokręciłem. Te śrubki mają podłużne otwory do takiej właśnie regulacji. W RA naprężenie był ok. Ponowie - moja ingerencja była bardzo subtelna i chińczyk nie spisał się źle W SW wymagane regulacje są o dwa rzędy wielkości większe. Co do luzu Dec - nie miałem okazji go sprawdzić po tej zmianie, mam jednak nadzieję, że tu był cały problem.
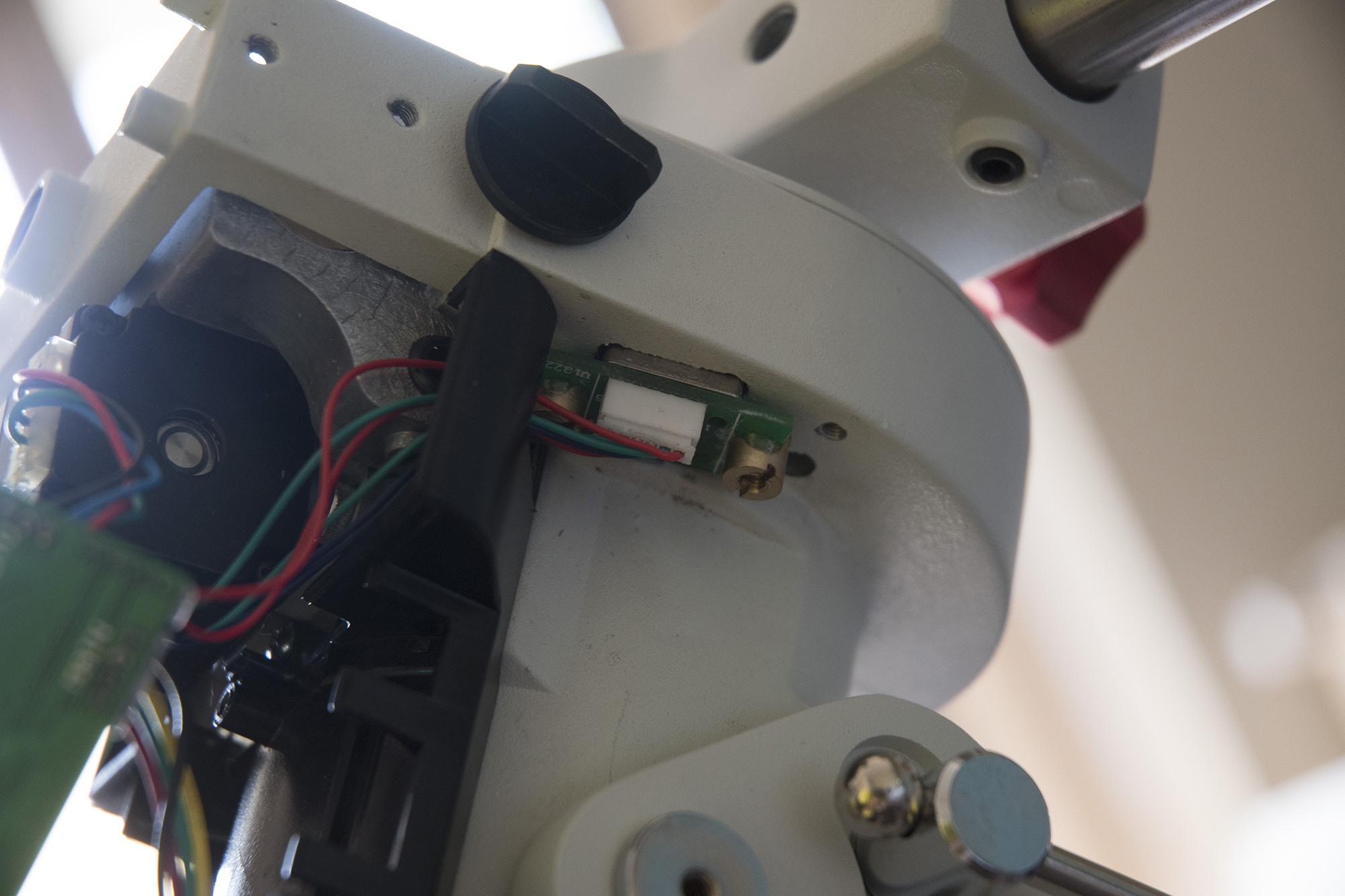
Pod niepozorną, małą pokrywką znajduje się niepozorna, mała płytka...
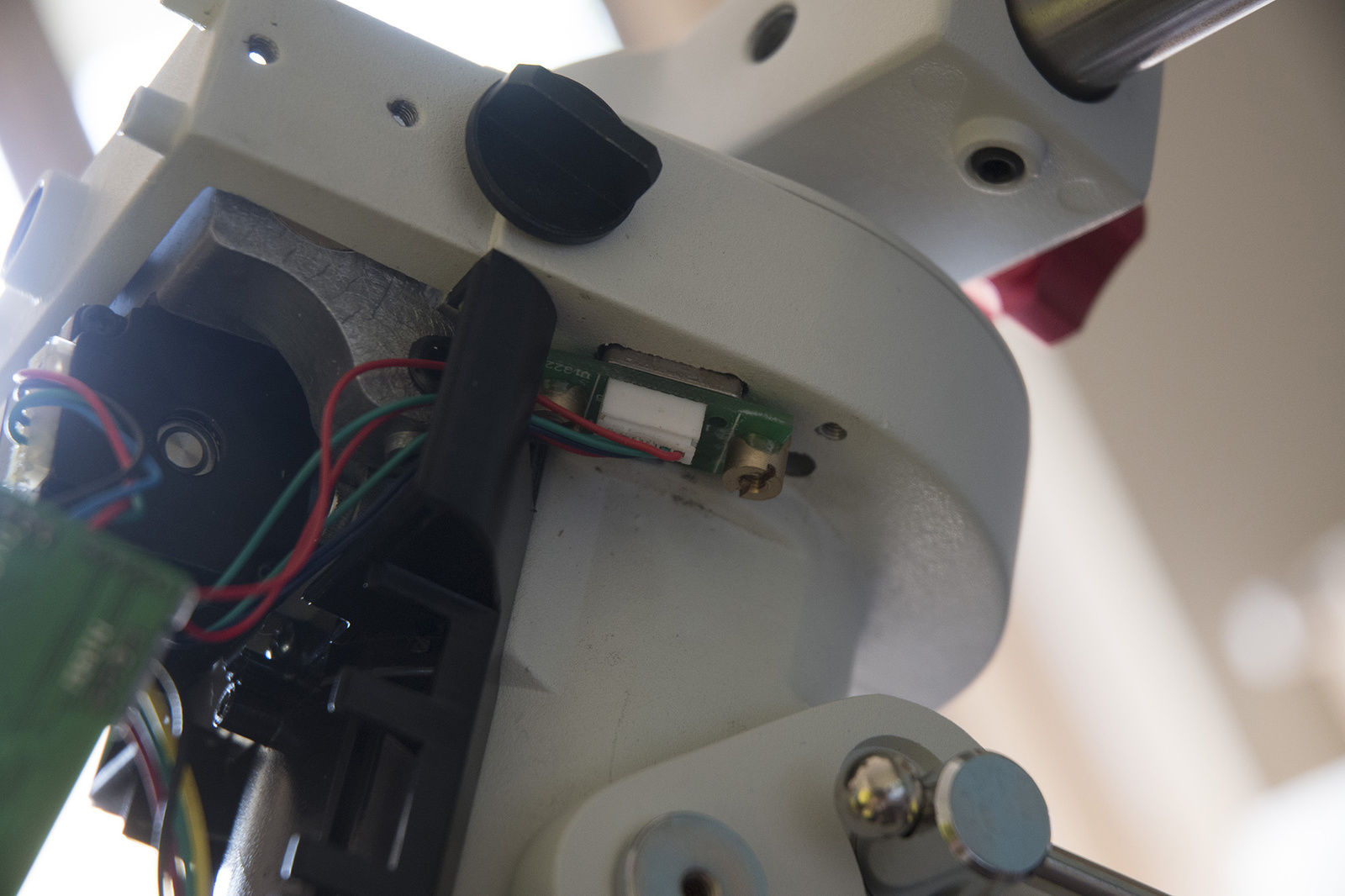
...czyli warty 3500 zł enkoder
Aż trudno uwierzyć, że takie gó**o tyle kosztuje No ale nie zapominajmy, że to niezwykle precyzyjne urządzenie. Prawdopodobnie pod ślimacznicą jest jego tarcza, ale nie chciałem tego rozkręcać, żeby nie popsuć...
Co do enkodera, czyli jedynej różnicy montaży CEM25P i CEM25-EC, to ma się on następująco. Jest to enkoder inkrementalny, nie absolutny. Z tego powodu nie jest w stanie sobie poradzić z dużą prędkością ruchu osi i pracuje w zasadzie tylko przy trackingu. A więc, po odsprzęgleniu osi i ręcznym obrocie, nie będziemy mieć już poprawnej pozycji. Na osi Dec nie ma enkodera, gdyby ktoś się zastanawiał (bo nie jest to jasno nigdzie napisane).
Generalnie zasada działania tego systemu jest taka, że enkoder na bieżąco monitoruje położenie głównej osi i robi korekty ruchu silnika, gdy pozycja odbiega od normy. Czyli to taki jakby guiding, tylko zamknięty w montażu. W odróżnieniu od guidingu, re korekty wykonywane są wiele razy na sekundę (nie ma podanego, ile), oraz są niewrażliwe na seeing itp. Teoretycznie więc taki enkoder powinien zaoferować nam idealnie płynne prowadzenie. Dzięki temu, że jest na osi głównej, może on usuwać PE, w odróżnieniu od enkoderów przy silniku (jak w Celestronie). Ale przez to, że jest na głównej osi, musi być bardzo precyzyjny (mieć wysoką rozdzielczość), bo nie dzieli go od teleskopu żadna przekładnia, i stąd jest taki drogi. W niektórych montażach SW mamy zastosowane również enkodery na głównej osi, ale o niskiej rozdzielczości. Nie należy mylić tych dwóch enkoderów - w SW są tanie i ich zadaniem jest zachowanie pozycji po rozsprzęgleniu osi, a w iOptronie są drogie i odpowiadają za usuwanie PE przy trackingu.
Jeśli chodzi o działanie enkodera w praktyce - na razie wstrzymuję się z werdyktem. W temacie:
opisuję moje boje ze zmierzeniem błędów prowadzenia oraz guidowaniem. Na pewno tytułową "złą prędkość gwiazdową" można już wsadzić między bajki
Ale czy enkodery działają tak dobrze, jak powinny to się jeszcze okaże. Bo teoretycznie powinny dawać nam 0,3" RMS. Na razie nie udało mi się tyle zmierzyć, ale sprawa nie jest prosta i wiele czynników zaburza pomiar. Wydaje mi się jednak, że tych 0,3" realnie nie ma, ale jest niewiele gorzej (ale to gdybanie).
Generalnie w pracy z takim enkoderem i bez guidingu największą przeszkodą jest refrakcja, która zmienia nieco prędkość gwiazdową w zależności od wysokości (alt) i warunków atmosferycznych. Nie da się jej dokładnie zamodelować (prędkość King rate to jakaś próba zgrubnego rozwiązania problemu). Są też ugięcia i inne niepozorne rzeczy, które mogą stać się wielkim problemem przy pracy bez guidingu. Montaż sam w sobie być może prowadzi super, ale te niezależne od niego sprawy powodują spadek jakości wynikowego efektu.
Na dzień dzisiejszy, testowałem montaż z APO65Q, o ogniskowej 420 mm, z ASI1600 i robiłem tym zestawem klatki po 120s, bez guidingu. Gwiazdki są praktycznie idealne, choć zdarzą się też nieco pojechane klatki (uzysk jest >90%). 3 min też potrafi pociągnąć, ale uzysk jest już zauważalnie gorszy. To zależy też od konkretnej nocy, bo nieraz jest lepiej, nieraz gorzej. Winna jest tu prawdopodobnie wspomniana refrakcja, która powoduje niewielki dryf w osi RA. Ale to jeszcze ustalę. W każdym razie, dryf w Dec, wynikający z błędu polarnej jest znacznie mniejszy, co potwierdza wysoką dokładność ustawiania lunetką biegunową.
Ciąg dalszy za chwilę (wstrzymajcie się z postami)
-
8
-
3
-
Sterowanie z PC
Komputer łączymy kablem z zestawu RS232, który wpisanym do pilota (o czym już pisałem). Oczywiście potrzebujemy przejściówki na USB. Szkoda, że w tak nowoczesnej konstrukcji nie ma od razu USB, oraz że złącze do PC nie znajduje się na montażu.
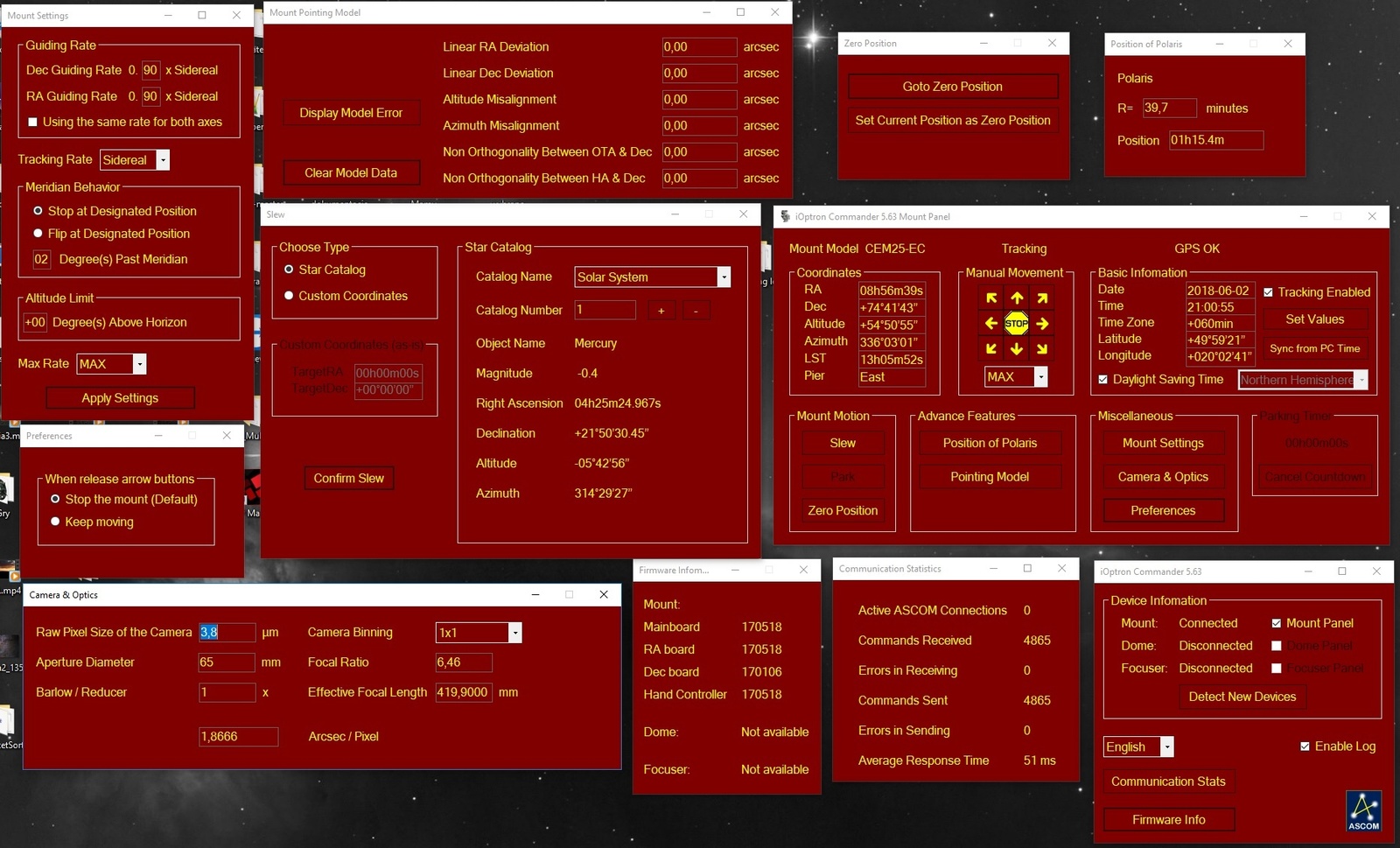
Software iOptrona przypomina trochę EQMod, a może jest nawet lepszy. Generalnie oprogramowanie iOptron Commander to tak na prawdę dwie rzeczy - sterownik ASCOM, oraz niezależny program z panelem kontrolnym. Możemy więc włączyć sam panel, bez uruchamiania żadnego programu astro. Po połączeniu się z montażem np w Maximie startuje nam okienko iOptron Commander (to z prawej na dole). Wybieramy w nim port COM przy pierwszym uruchomieniu (jest automat do wykrywania). jak widać, może on sterować również focuserem i kopułą iOptrona - nie wgłębiałem się w temat. Po zaznaczeniu checkboxa Mount Panel startuje nam to największe okienko z prawej. Mamy to do wyboru szereg opcji, podobnie jak w EQMod. Pozostałe okienka, które są na screenie, wyświetlają się po kliknięciu w któryś z przycisków na panelu o adekwatnej nazwie. Robić można tu praktycznie wszystko, co w pilocie (nie zauważyłem, żeby czegoś brakowało). Jedyna rzecz, której nie rozumiem to opcja Park, która jest nieaktywna. Opcja Zero Position tak na prawdę robi to, co w innych montażach nazywa się właśnie Park (w pilocie też jest zero position). Trudno więc powiedzieć, co ma robić Park i dlaczego jest permanentnie nieaktywny.
Po włączeniu montażu można od razu wystartować soft na PC i połączyć się z montażem - nie są wymagane żadne czynności na pilocie, czyli idealna opcja do zdalnej obsługi. Trudno też powiedzieć, czy dałoby się usunąć pilot z układanki - na razie nie znalazłem nic na ten temat. Pytanie, jaki jest protokół do komunikacji z montażem. Generalnie rzecz biorąc, montaż współpracuje tylko ze swoim softem, nie połączymy go z EQMod, albo czymś innym (żadna strata).
Montażu używałem z Maximem. Generalnie działa to analogiczne, jak z SW. Klikamy na mapie, montaż jedzie. Robimy plate slove itp. Wszystkie polecenia realizowane są bezzwłocznie, a potężna prędkość goto daje odczuwalne przyspieszenie. Poza prędkością max, montaż znacznie szybciej dokonuje małych przesunięć. SW poniżej pewnego dystansu przesuwa się ze stałą, małą prędkością, natomiast iOptron wciąż rozpędza się tak samo, z tym że zazwyczaj nie zdąży osiągnąć max prędkości i już hamuje (w efekcie małe goto są wciąż szybkie).
Trudno mi powiedzieć, co się dzieje z modelem (punktami alignacji) po wyłączeniu zasilania lub zaparkowaniu (w sensie zero position). Nie wiem, czy je zapisuje, czy traci, ale wydaje mi się, że zapisuje (zapewne w pilocie, a nie PC, choć to też niejasne). Jest opcja wyczyszczenia tych danych, ale nie ma możliwości podglądu punktów aligmentu.
Soft sprawdza sobie wersję firmware i informuje o konieczności aktualizacji. Do tego procesu jest osobny, prosty program, w którym wskazujemy jedynie plik z softem i nr COM montażu. Co istotne, robimy osobno (osobne pliki) aktualizację modułu RA, Dec i pilota. Mój montaż fabrycznie nie miał najnowszego firmware i aktualizacja przebiegła bez problemu.
Ciąg dalszy za chwilę (wstrzymajcie się z postami)
-
6
-
3
-
-
- Ta odpowiedź cieszy się zainteresowaniem.
- Ta odpowiedź cieszy się zainteresowaniem.
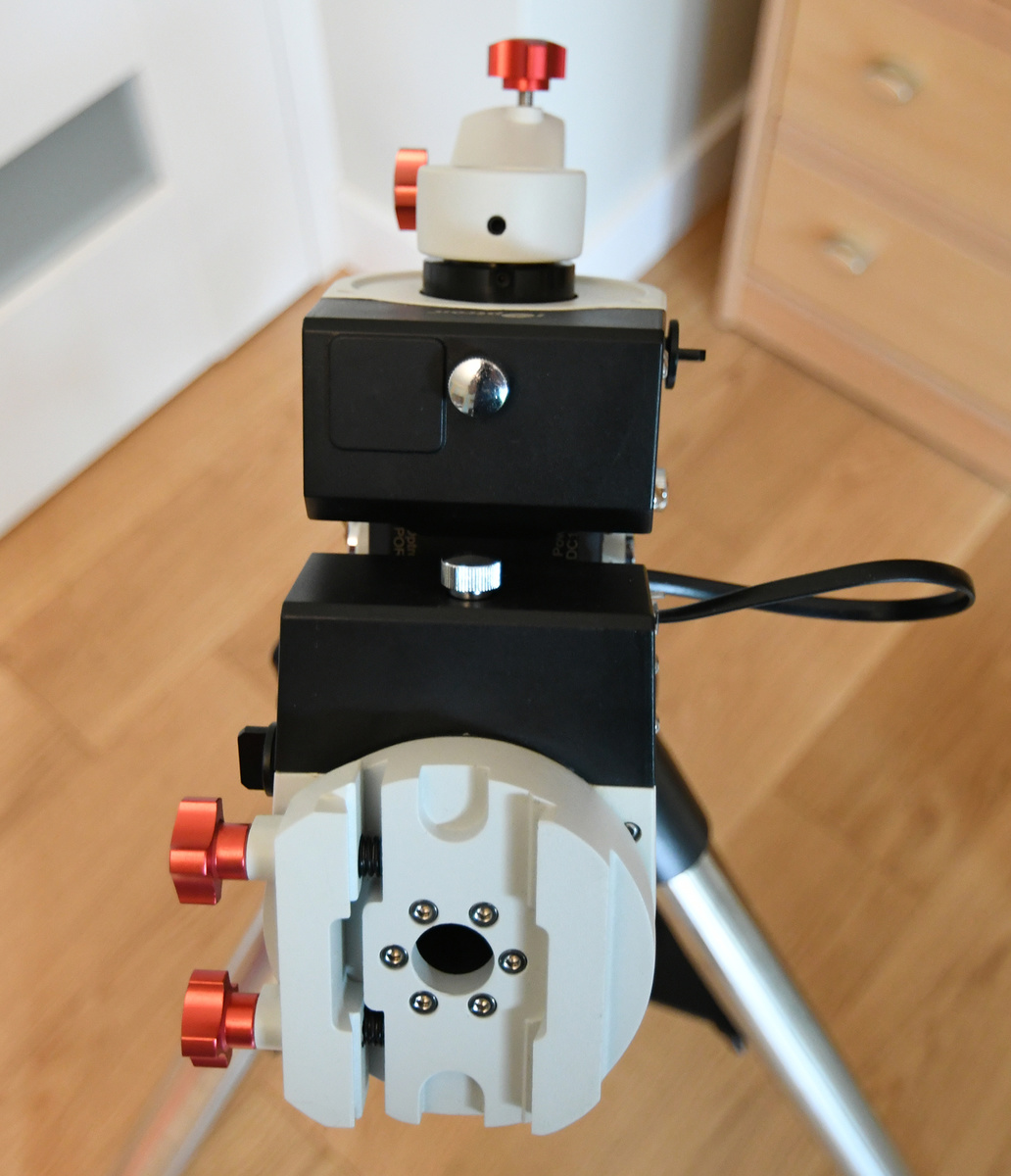
Elektronika, złącza, pilot
W "module głównym" montażu mamy kilka złącz:

- iOptron port - do podłączenia akcesoriów iOptrona
- HBX - pilot
- Reticle - podświetlanie lunetki
- Power - zasilanie
- DEC - do modułu Dec
- Off/On - wyłącznik
Ponadto z boku, w module RA jest gniazdko autoguidera ST4. Generalnie wszystkie złącza poza zasilaniem i lunetką są zrobione na RJ12. Dzięki temu jest to wszystko małe i kompaktowe. Ze dwa razy jednak zdarzyło mi się, że pilot nie wykrył montażu przy włączeniu - prawdopodobnie nie kontaktował kabel pilota. Ale nie zdarzyło mi się nigdy, żeby komunikacja się urwała podczas działania. Zasilanie to klasyczne złącze DC 5,5/2,1 z plusem w środku. W zestawie jest zasilacz!!! Rzecz absolutnie niespotykana i ewenement na skalę światową!!!
Zasilacz jest mały i zgrabny, ma 1,5A i 12V. Wg producenta pobór prądu to jedynie 0.35 A(Tracking), 0.6 A(GOTO). Zatem kolejny wielki plus przy mobilnych zastosowaniach.
Z zasilaniem wiąże się jeszcze jedna ważna sprawa - koło gniazdka zasilającego jest na tyle ciasno, że wtyczka musi być kątowa. Taką właśnie wtyczkę ma zasilacz w zestawie. Ale jak podłączyłem swój kabel, to się zdziwiłem, gdy wtyczka zahaczała o korpus Dec podczas ruchu. Tak na prawdę to nie ma chyba większego znaczenia, bo zahacza tylko nieznacznie, ale dla świętego spokoju o tracking warto mieć tą wtyczkę kątową, jak oryginalny zasilacz. Jak widać na zdjęciu, również wtyczka do lunetki jest kątowa. A ponadto, w korpusie Dec jest na nią specjalne wycięcie, żeby się zmieściła - projektanci walczyli o każdy milimetr
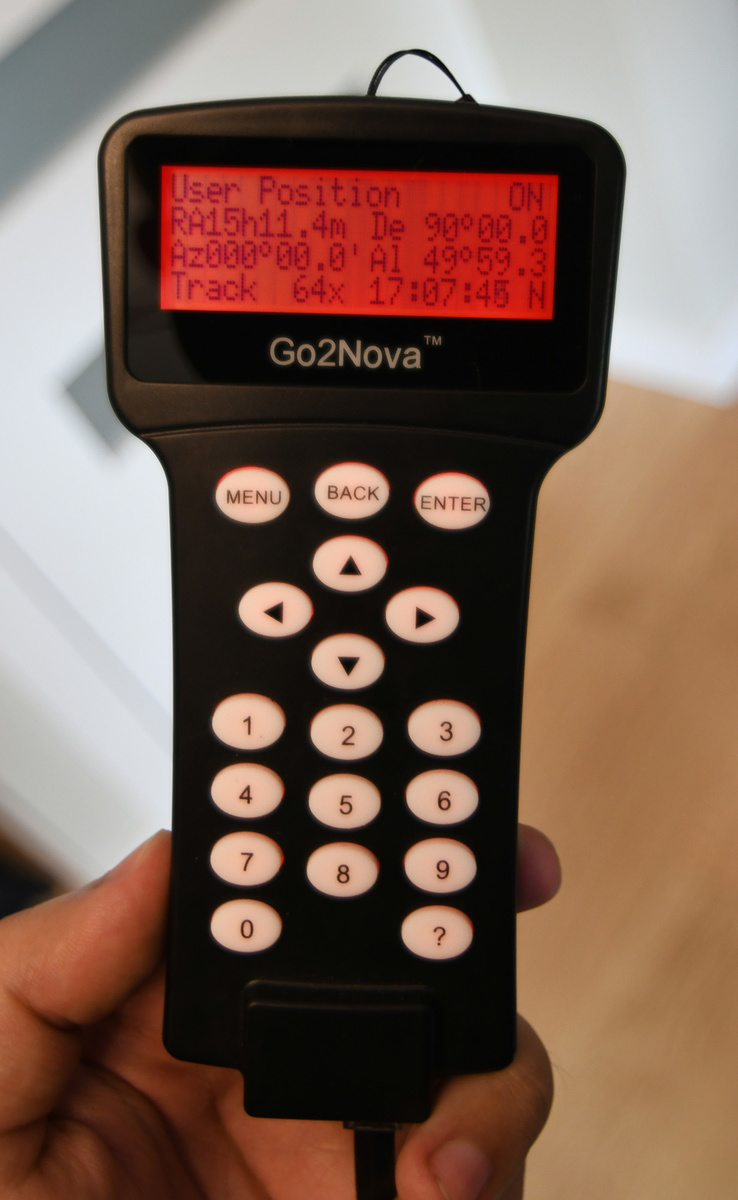
Pilot jest mniejszy niż w SW, ma za to większy wyświetlacz (4 linie). Wyświetlacz to graficzny LCD podświetlany na czerwono. Tak jak w innych montażach, tak tutaj niestety nie sprawdza się on na niskiej temperaturze - czas odświeżania staje się denerwujący. Ciekawe, kiedy przejdą na OLED, jak DreamFocuser?
Mamy w pilocie dwa złącza - do montażu RJ12 (jest spiralny kabelek w zestawie), oraz do PC - złącze RJ 4-pinowe, również jest kabelek ze standardowym złączem DB9 z drugiej strony (czyli RS232). Szkoda, że nie zastosowali już USB, jak na tak nowoczesną konstrukcję. O współpracy z PC będzie napisane później.
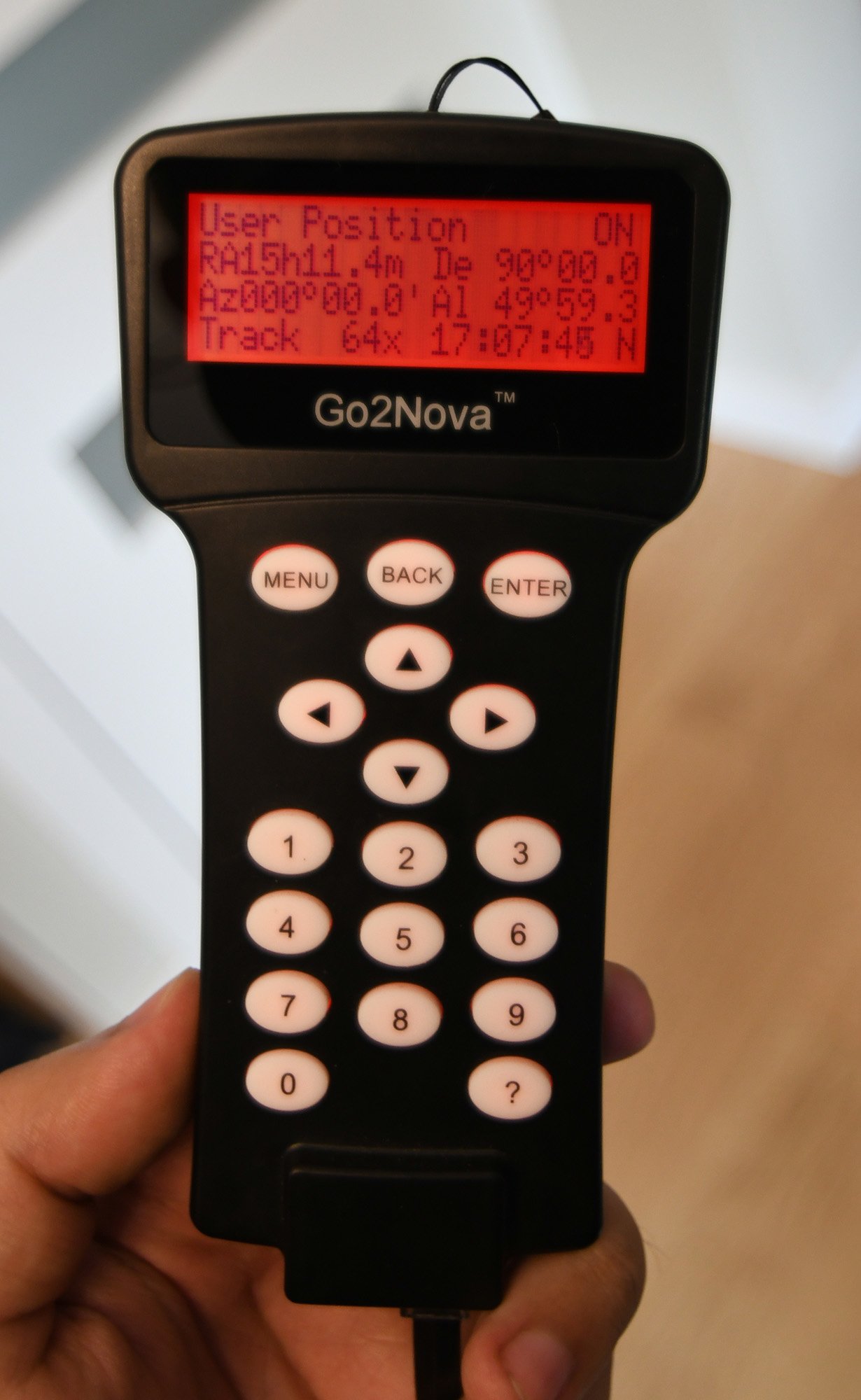
Klawisze gumowe, podświetlane na czerwono - standard. Filozofia obsługi pilota jest już nieco inna, niż nas przyzwyczaił SW, ale intuicyjna i osobiście bardzo szybko załapałem jak wszystkiego użyć. Bardzo ważna rzecz- jest wbudowany GPS. Dzięki temu nie musimy zaprzątać sobie głowy wprowadzaniem czasu i współrzędnych. Po uruchomieniu pilota wita nas logo i za chwilę mamy ekran widoczny powyżej na zdjęciu. Nie ma żadnego etapu inicjalizacji, jak w innych montażach - to za sprawą GPS. GPS łapie fixa szybciutko i w zasadzie o nim nie myślimy, bo dzieje się to "pod spodem". Właśnie rozkminiłem, że po złapaniu fixa pilot wydaje sygnał dźwiękowy (do tej pory mnie niepokoił, bo myślałem że coś zgłupiało i piszczy bez powodu
). Dodatkowo, pilot ma zegarek RTC z baterią - czyli nawet bez GPS wie, która jest godzina.
Ekran główny pokazuje nam współrzędne na które celujemy, status GPS (ON - trwa łączenie, OK - połączony), status trackingu, prędkość ruchu strzałkami i czas. W tym stanie kliknięcie dowolnej cyfry 1-9 powoduje zmianę prędkości ruchu strzałkami (nie trzeba wchodzić w ekran wyboru prędkości). Klawisz 0 włącza i wyłącza tracking. Pytajnik wyszukuje w bazie obiekt, na który wg montażu właśnie celujemy. Strzałki klasycznie - kręcą osiami.
Klawisz menu wchodzi do menu (odkrywcze
). Ale co ważne, w menu poruszamy się tymi samymi strzałkami, co ruch osi, a nie osobnymi klawiszami. W menu po prostu montażem nie możemy już kręcić. Struktura menu zorganizowana jest intuicyjnie, większość opcji podobna jak w innych montażach. Mamy 1,2,3-star align (po 3-star podaje nam info o błędzie polarnej, błędzie stożkowym i nierównoległości osii RA do Dec - o tym ostatnim nawet bym nie pomyślał, że istnieje...), funkcję ustawiania polarnej na podstawie goto (jeszcze nie testowałem), pokazanie pozycji polarnej w lunetce, oraz co oryginalne - opcję dziennej alignacji goto na planetach (chyba bez Słońca). Baza obiektów goto wydaje się spora, jest kilka podstawowych katalogów, jest Słońce, są asteroidy i komety (nie wiem, czy da się je aktualizować). Mamy też pamięć na własne obiekty, oraz możliwość wpisania wprost RA i Dec, na które ma pojechać (brakuje tego w SW). Poza standardowymi prędkościami trackingu mamy możliwość podać swoją, oraz "King rate". Ta ostatnia to jakiś specjalny model, który ma uwzględniać zmianę prędkości z powodu refrakcji atmosferycznej, czyli generalnie najlepsza opcja do nieguidowanych ekspozycji. Wersja montażu bez "EC", czyli bez enkoderów ma jeszcze funkcję PEC, mój nie ma (bez sensu by była). W menu jest opcja sterowania focuserem - pewnie da się dokupić kompatybilny, podpinany do iOptron port.
Istotną rzeczą jest, że montaż pamięta pozycję w jakiej jest, nawet po utracie zasilania. Z tego powodu, jeśli wyłączymy montaż bez parkowania i ręcznie, na luźnych osiach, wrócimy na pozycję startową, to po włączeniu montaż będzie myślał, że nada jest w tej dziwnej, niezaparkowanej pozycji. Rodzi to dwie konsekwencje - jeśli zrobimy teraz aligment, to na pierwszą gwiazdę pojedzie względem starej pozycji, a więc w zupełnie złe miejsce. Może się też zdarzyć, że przekroczy w tej sytuacji meridian i zawadzi silnikiem o korpus, bo nie wie gdzie jest (raz mi się zdarzyło). Druga sprawa jest taka, że funkcja wyłączenia trackingu lub flipa po przekroczeniu meridianu będzie teraz źle działać i zatrzyma nam montaż za wcześnie, albo za późno. Kolega gryf miał taką przygodę i stracił kilka godzin focenia, bo tracking stanął za wcześnie. Tak więc warto uważać, żeby zawsze parkować montaż, albo nie przestawiać go ręcznie, jeśli nie zaparkowaliśmy go wcześniej. Opisana tu funkcja ma na celu, aby przy utracie zasilania nie stracić pozycji i po przywróceniu go nadal działało goto - i w tej sytuacji pewnie się spisze.
Maksymalna prędkość montażu to 1440x, a więc fenomenalnie szybko! Znacznie szybciej, niż SW. GOTO z pilota działa dobrze. Nie testowałem go dużo, ale trafiał raczej z małym błędem.
Podsumowując pilot i sposób użytkowania, jest on dobrze przemyślany, posiada kilka przydatnych funkcji, których brakuje konkurencji, jest intuicyjny i wygodny.
Ciąg dalszy za chwilę (wstrzymajcie się z postami)
-
7
-
3
-
- Ta odpowiedź cieszy się zainteresowaniem.
- Ta odpowiedź cieszy się zainteresowaniem.
Jakość wykonania głowicy

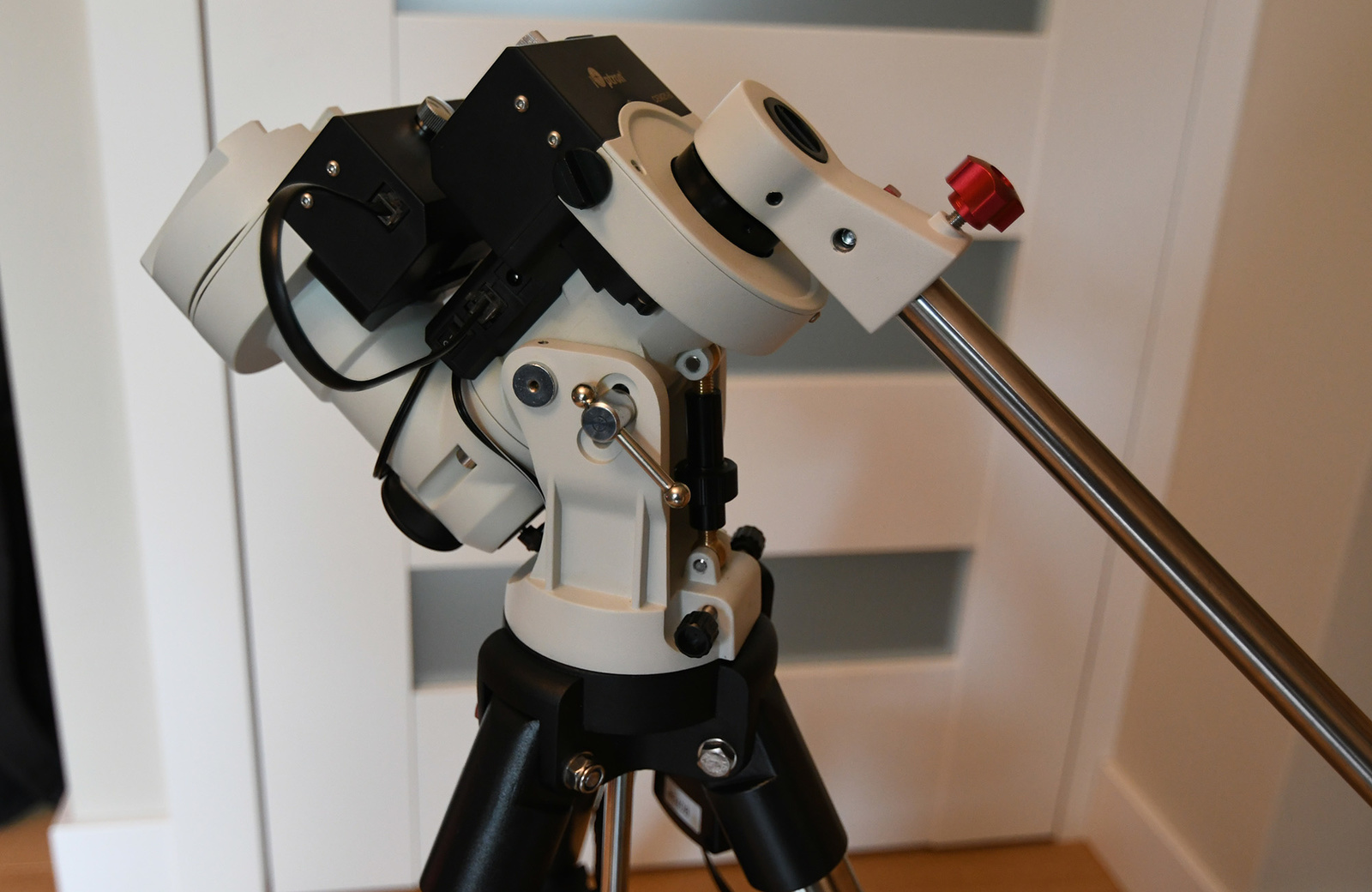
Krótko mówiąc jest genialna
Sama głowica z prętem i pilotem waży 5,4 kg z czego pręt aż 0,74 kg. Głowica jest wykonana w nietypowej konfiguracji - central-balanced, co odznacza się przeniesieniem części z osią DEC na spodnią stronę osi RA. Z tego powodu montaż jest wyważony nie tylko w osiach RA i Dec, ale też w wysokości (regulacja polarnej). Stwarza to kilka plusów - lekka regulacja polarnej z całym setupem, wyważenie sprzętu na statywie (stabilniej stoi na ziemi), głowica jest bardziej kompaktowa. Ale coś za coś - wspomniany już gorszy dostęp do lunetki, oraz ograniczony zakres obrotu RA - trzeba robić flipa prawie od razu, bo kilka stopni za meridianem zahaczymy silnikiem o montaż (niezależnie od deklinacji). Pilot ma do tego odpowiednią funkcję - można zdefiniować czy po osiągnięciu meridianu ma się zatrzymać tracking albo zrobić automatycznie flipa, oraz określić, ile stopni ma z tym "zwlekać". Tak więc jesteśmy spokojni.
Pręt przeciwwagi jest chyba cały z nierdzewki, także nie zacznie nam korodować, jak go sharatamy przeciwwagą (jak w SW). Jest w nietypowy sposób mocowany za pomocą dwóch śrub (czerwone). Jedna wkręca się w pręt z boku i go trzyma. Druga od góry robi docisk, żeby się nie ruszał. Od spodu mamy imbus, którym możemy regulować odchylenie pręta w górę, co ma mieć zastosowanie na niskich szerokościach geograficznych (można go używać nawet na równiku, SW na to nie pozwala). W zestawie mamy jedną przeciwwagę 4,7 kg, porządnie pomalowaną (może się nie obije
). Blokada przeciwwagi posiada taką ruchomą końcówkę, żeby nie rysować pręta przy dokręcaniu. Niestety ta końcówka sobie lata i przy poluzowanej śrubie, jak nakładamy przeciwwagę może nam zablokować możliwość nałożenia - trzeba ją wtedy palcem podnieść. Nie jest to duży problem, ale jakoś wolałem zwykłą śrubę z plastikową końcówką od tego rozwiązania. Pręt jest niestety ciut grubszy, niż SW, więc nie zastosujemy przeciwwag SW. Ale za to gwint nakrętki blokującej jest taki sam (M12), więc możemy użyć przedłużkę pręta SW, albo jakiś ATM przykręcić.
Udźwig montażu producent ocenia na 12,3 kg, co daje całkiem niezły stosunek udźwigu do wagi własnej. Ja wieszałem na razie najwięcej 4,5 kg. Wówczas przeciwwaga była w okolicy połowy pręta, więc być może jedna przeciwwaga wystarczy przy max payloadzie. Teleskop jest tutaj dość blisko osi obrotu, dzięki czemu przeciwwaga może więcej zrównoważyć.
Siodełko vixena jest porządne, dokręcamy dovetaila całą boczną powierzchnią, a nie samymi śrubami, więc nic nie nie rysujemy (rozwiązanie podobne do NEQ6).
Z boku mamy małe oczki poziomicy, która jest raczej dobrze ustawiona. Niestety od góry zasłania ją trochę korpus, więc nie można spojrzeć z góry. Skala wysokości jest ok do zgrubnego ustawienia. Generalnie na montażu nie mamy żadnych skal RA i Dec.
Korpusy są dobrze do siebie spasowane. Pokrywki silników i elektroniki plastikowe, reszta metal. Wszystko jest zrobione na prawie styk, jeśli chodzi o zahaczanie przy ruchu osi RA (czyli upakowane na maksa). Elektronika jest podzielona na dwie części - silnik i płytkę RA, wraz ze zlokalizowaną pod wspólną pokrywką płytką główną ze wszystkimi złączami, oraz moduł Dec ze swoim silnikiem i elektroniką. Niestety elektronika jest jakby "na zewnątrz", więc moduł Dec musimy łączyć zewnętrznym kabelkiem RJ12. Nie stwarza on problemów, nie plącze się, ale w psychice zostawia niesmak.
Ciąg dalszy za chwilę (wstrzymajcie się z postami)
-
9
-
4
-
- Ta odpowiedź cieszy się zainteresowaniem.
- Ta odpowiedź cieszy się zainteresowaniem.
Lunetka biegunowa i regulacja bieguna

Jakość lunetki jest bardzo wysoka, deklasuje SW. Jest pierścień do regulacji ostrości (który w odróżnieniu od SW nie ma luzów). Wzajemna ostrość siatki i obrazu jest zgrana idealnie (ponownie w SW trzeba było poprawiać za fabryką). Sama siatka wykonana bardzo precyzyjnie, linie są znacznie cieńsze niż w SW. Wycentrowanie jest fabrycznie bardzo dobre, brakuje tylko ciut do ideału. Jednak nie wiem jeszcze, gdzie reguluje się justowanie, bo przy okularze brak śrub. Są 3 robaki koło wylotu lunetki, jednak jeszcze nie mam pewności, co robią. Sprawa do obadania. Tarcza lunetki jest też zgrana w obrocie do osi montażu - w pozycji zaparkowanej mamy godzinę 12 na górze, co jest sporym ułatwieniem.
Jedyna wada lunetki to że jest bardzo schowana, nie wystaje. Przez co trudno przyłożyć do niej oko. Z budowy montażu wynika też, że z założoną tubą mamy ją tuż nad głową w trakcie patrzenia przez lunetkę i ustawiając polarną z całym osprzętem trzeba uważać żeby nie przywalić głową w tubę. Generalnie dostęp jest utrudniony, ale bez przesady - nie ma tragedii.
Lunetka jest oczywiście podświetlana, z opcją regulacji jasności w pilocie. Podświetlana jest sama tarcza od boku, a nie tępa dioda świecąca od przodu po całym obrazie, jak w SW. Układ podświetlania jest wbudowany, ale trzeba go podłączyć zewnętrznym kablem do montażu - wada, ale nieduża, bo kabel da się ładnie owinąć i zostawić na stałe.
Tak wygląda rysunek w lunetce.
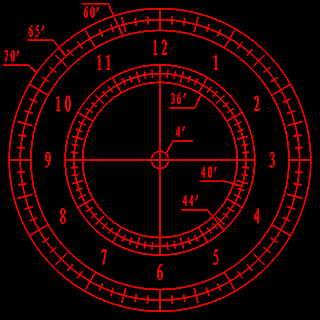
Widać podobną koncepcję, jak np w Adventurerze - mamy narysowaną podziałkę i ustawiamy polarną na odpowiedniej godzinie, a nie kręcimy całą głowicą, jak w "klasycznym, starym SW". Zewnętrzne okręgi są dla bieguna południowego, wewnętrzne dla polarnej. Mamy tutaj 3 okręgi - każdy dla innej odległości polarnej od bieguna (która zmienia się w kolejnych latach wraz z precesją).

Pilot posiada świetną funkcję wyświetlającą informacje niezbędne do użycia lunetki - godzinę na tarczy, oraz odległość od środka (czyli który okrąg wybrać). Ponadto jest obrazek tarczy, żeby upewnić nas, czy dobrze zrozumieliśmy liczby. W SW mamy podobną funkcję, jednakże wyświetla tylko godzinę. Stare lunetki SW nie miały żadnej korekcji na precesję, a nowe już tak, jednakże należało wyboru okręgu dokonać na podstawie "legendy" w lunetce, która była na jej peryferiach. Odczytanie tego z ekranu jest wygodniejsze.

Regulacja wysokości zrealizowana jest na bazie śruby rzymskiej, czyli kręcimy tylko tym czarnym pokrętłem, zamiast dwóch przeciwstawnych śrub popychająchych "język", jak w większości montaży. Ponadto mamy po bokach dwie śruby (z tym "dynksem") do unieruchomienia/dociśnięcia. Dodatkowo dostajemy w zestawie drugi czarny element, który jest krótszy i nadaje się do użycia w mniejszych szerokościach geograficznych.
Sama śruba rzymska posiada pewien luz, czego oczywiście nie da się uniknąć. Jednakże po dociśnięciu bocznych blokad opór jest już wystarczający, żeby wysokość nie zmieniała się sama pod ciężarem sprzętu. Jednocześnie wciąż można wystarczająco lekko kręcić śrubą rzymską, więc nie trzeba już ruszać tych blokad.
Azymut regulujemy podobnie, jak w innych montażach. Śrubki chodzą ok, jednak mogłyby być dłuższe - są trochę schowane w korpusie i dostęp do nich jest utrudniony. Większe pokrętła też by nie zaszkodziły.
Całościowo system ustawiania polarnej oceniam wzorcowo. Ustawienie jest bardzo szybkie i proste, a precyzja duża. Jak dotąd ustawiałem polarną tylko przez lunetkę i wystarczało to do ciągnięcia np 3 min ekspozycji na ogniskowej 420 mm bez guidingu. Raczej nic więcej nie potrzeba do focenia w polu. Jedynie trzeba się schylać i przykładać oko w miejsce z nieco utrudnionym dostępem.
Ciąg dalszy za chwilę (wstrzymajcie się z postami)
-
8
-
3
-
- Ta odpowiedź cieszy się zainteresowaniem.
- Ta odpowiedź cieszy się zainteresowaniem.

Zakup
Montaż kupiłem w Astroshop.pl, który jak najbardziej polecam. Był to mój pierwszy zakup u nich. Cenę mieli zdecydowanie najniższą na rynku - 7200 zł, niższą np od TS. Generalnie w ostatnich miesiącach pojawiła się chyba ogólnoświatowa promocja na ten montaż - wcześniej kosztował 10-11k. Astroshop daje 2% rabatu przy płatności przelewem - przy tej kwocie daje to już sporo. Rozliczamy się w euro, więc cena zależy tak na prawdę od kursu naszego banku.
Polecam kontakt telefoniczny - mimo że to sklep niemiecki, jest bardzo miła pani mówiąca po polsku
Sklep w chwili zakupu miał na stanie tylko głowicę bez statywu i zaproponowali wysyłkę samej głowicy od razu, a statyw po ok miesiącu dotarł osobno bez żadnej dopłaty za przesyłkę (a przesyłka niestety droga - ok 80 zł za UPS, bo zagraniczna).
Budowa i jakość wykonania statywu
Montaż kupiłem w wersji ze statywem 1,5", jest jeszcze 2" do wyboru. Statyw generalnie porządny, nogi nierdzewne, czarne korpusy odlewane, a końcówki nóg plastikowe (to akurat zaleta, bo nie rysują podłogi
). Waga statywu to 4,45 kg, a półeczki 0,57 kg. Jak widać, półeczka jest dość ciężka, w porównaniu np z SW.
Nierdzewna rura jest mocowana w korpusach za pomocą pojedynczych śrub, w odróżnieniu od SW, gdzie mamy po 4 robaki blokujące. Stwarza to wadę i zaletę - wada bo rury troszkę się kiwają, nie jest to idealnie spasowane. Z tego powodu w zasadzie obowiązkowe jest przykręcenia półeczki między nogami, co przywraca całkowitą sztywność. Zaleta natomiast to możliwość odkręcenia tych śrubek i rozłożenia statywu na części, co stwarza spore możliwości do ATMu - np w celu redukcji wagi i rozmiarów do transportu lotniczego. W SW robaki są często zapieczone, a nawet jak nie to same rury wsadzono na wcisk i nie da się ich wyjąć.
Baza statywu (góra) jest masywna, nogi rozkładają się z odpowiednim oporem. Pokrętła do zakręcenia głowicy i tacki są duże i wygodne. Jest możliwość zmiany strony zamocowania trzpienia do regulacji azymutu. Statyw łączy się z głowicą gwintem 3/8" ("duży statywowy"), czyli tak samo jak w statywach foto. Niestety, kształt mocowania wyklucza możliwość przykręcenia głowicy do nóg od klasycznego statywu - da się, ale całość spiera się wtedy na małej wypustce na środku i połączenie to jest bardzo chybotliwe. Poza tym nie ma wtedy trzpienia do regulacji azymutu, więc generalnie nie ma sensu zakładać tej głowicy np na nogi manfrotto (co byłoby przydatne na wyjazdy). Połączenie oryginalnych nóg z głowicą jest oczywiście super.
Przez ten miesiąc, gdy statyw płynął do mnie przez ocean, używałem głowicy na statywie pożyczonym od @gryf188, który dokonał modyfikacji statywu aluminiowego SW (od EQ3-2). Nieco go skrócił i usztywnił, oraz dorobił prosty adapter, aby pasował do głowicy iOptrona. Generalnie adapter jest prosty i lekki, nie tak jak np pod Adventurera, któremu trzeba dodawać spory klocek aluminium z uwagi na inny kształt mocowania. Ten statyw waży tylko 2,5 kg i jest tylko trochę niższy od iOptrona. Sztywność jest po stronie iOptrona, ale spokojnie wystarcza ten alu. Tak więc na wyjazdy super sprawa.
ciąg dalszy za chwilę...
-
12
-
5
-
6 minut temu, Limax7 napisał:
Nie wiem czy coś takiego istnieje. Ciekawą rzeczą byłaby jakaś aplikacja na Androidzie gdzie obserwatorzy mogliby kilkać że np. widzą zorzę, NLC, meteory czy inne zjawiska nieprzewidywalne a wówczas wszyscy mający apkę mieli by komunikat na bieżąco
")
Kiedyś zastanawiałem się nad koncepcją takiej strony/aplikacji i gdybym tylko jakkolwiek siedział w tych gałęziach informatyki, to pewnie bym zrobił
Niestety to nie moja działka.
-
Jak na SharpCapa wpływa dokładność ustawienia deklinacji 90 na osi Dec? Nie mogę uwierzyć, że z dwóch pomiarów potrafi określić błąd polarnej i nie ma problemów z innymi błędami, jak deklinacja, nieprecyzyjny obrót o 90 st, błąd stożkowy itp.
W dniu 1.06.2018 o 08:07, JaLe napisał:7. Pojawia się komunikat z informacją w którą stronę powinniśmy przesunąć montaż - co czynimy przy pomocy śrub (lewo - prawo, góra-dół)
Czy program nie podpowiada nam np pokazując na zdjęciu, ile należy go przesunąć? Robimy to zupełnie na czuja?
-
Hej
Mogę się zgłosić na testy. Mocowania masz drukowane? Mógłbyś mi podesłać plik do drukarki, to bym sobie wydrukował, bo mam dostęp do drukarki. Jaką ogniskową ma szukacz? Ja mógłbym zastosować swój guider z ogniskową 93 mm:
Zastanawiam się, czy równoległość obiektywu do osi nie jest tutaj kluczowa? Nie widzę regulacji u Ciebie.
-
4 godziny temu, HAMAL napisał:
Może przywrócenie systemu do kiedyś tam ?
Mógłbym go nawet totalnie wywalić i przeinstalować, ale trochę nie mam na to czasu...
-
3 godziny temu, RMK napisał:
W tym prostym przypadku masz Kamera USB - sterownik kamery - chipset na płycie - sterownik chipsetu - magistrala - bufor RAM - dysk (w uproszczeniu).
Nie bardzo teraz mogę czytać cały wątek ale jeśli cokolwiek zmieniłeś w tej układance ma prawo zachować się inaczej. Zresztą przykład dawałem w jakimś wątku dotyczącym kamery
Ale problem nie jest wyłącznie w FireCapture. On występuje nawet przy zwykłym kopiowaniu pliku, pokazywałem screeny. Czyli nie ma nic wspólnego z USB i kamerą. Co najwyżej RAM może być faktycznie jakiś uwalony, ale nie odczuwam z nim problemów w aplikacjach, które potrzebują dużo ramu. Jeśli masz jakąś inną aplikację, która potrzebuje szybko zapisywać dane na dysku, to podeślij - sprawdzę ją, ale założę się, że również będzie zamulać.
56 minut temu, _Spirit_ napisał:Nie ryzykował bym win 10 do pracy pod niebem.
Ten laptop służy tylko do awikowania, to nie jest tak "strategiczna" operacja, jak sesja DSowa. Używam go też na co dzień.
57 minut temu, _Spirit_ napisał:Update win 10.
W Wersji Pro można bez kombinowania wyłączyć aktualizacje automatyczne, zrobiłem tak na każdym kompie jaki mam i jest spokój. W Home trzeba coś kombinować, z tego co wiem, ale też się chyba da (nie mam, to nie sprawdzę).
-
4 godziny temu, _Spirit_ napisał:
Szukaj dalej. Wyjmij jedną kośc RAM jeśli masz dwie, później załóż drugą i testuj.
Ok, tak zrobię.
4 godziny temu, _Spirit_ napisał:Rozumiem że dysk już pracował i wcześniej było wszystko ok? Co się zmieniło?
Tak, dysk pracował i kilka miesięcy temu było wszystko dobrze. Nie zmieniło się nic, jedynie updaty windowsa.
-
42 minuty temu, Limax7 napisał:
Brakuje RAMu lub plik stronicowania zbyt mały
Ramu jest 8 GB, Autostakkert umie sobie zagarnąć jakieś 1,7GB (nie ogarniam czemu tak mało, ale tak jest wszędzie akurat). Ramu jest dość, żeby zbuforować krótkie wahania dysku. Ale jeśli dysk średnio rzecz biorąc za wolno zapisuje, to każda ilość ramu kiedyś się skończy i zacznie ścinać. Także kończący się ram to wina dysku.
39 minut temu, Limax7 napisał:Zrób test Compression-Benchmark Test
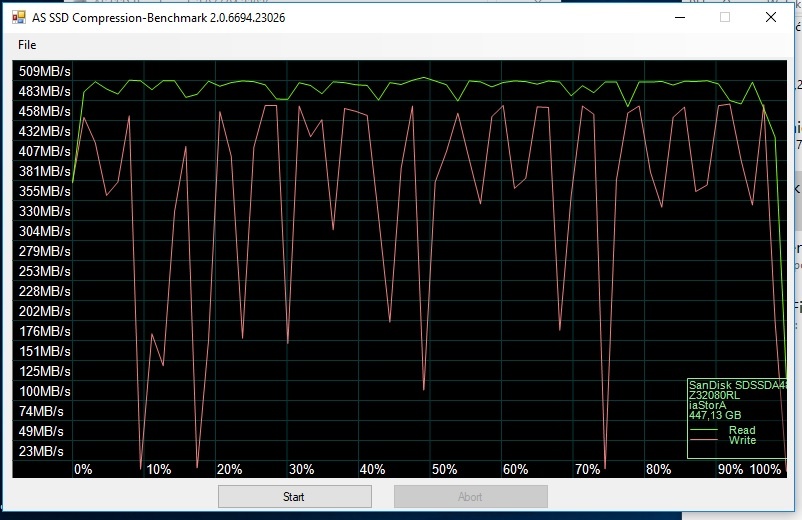
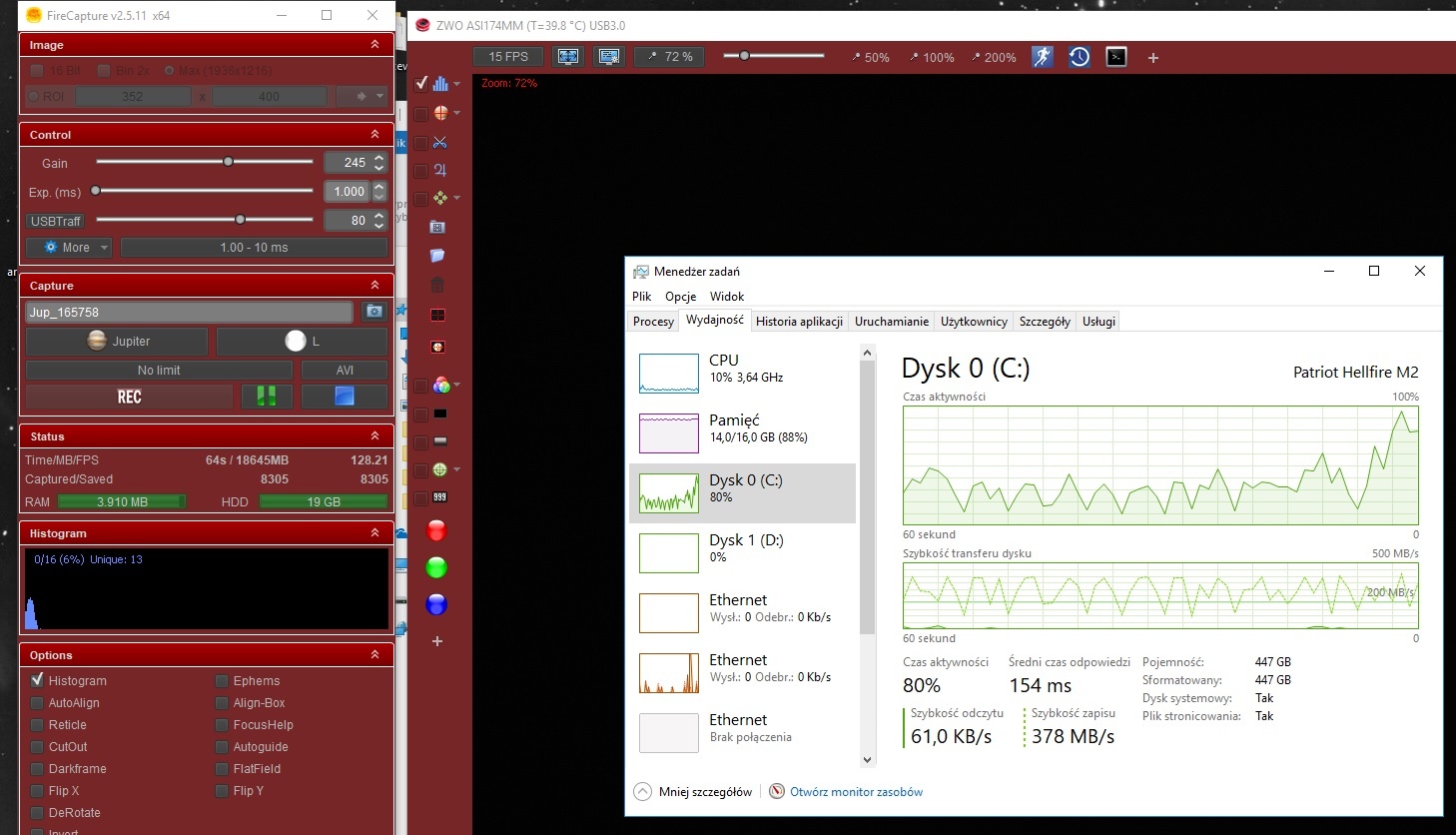
Widać tu na moje oko, że coś jest nie tak. Wreszcie jakiś test, który potwierdza problem. Duże wahania prędkości, podobnie jak przy kopiowaniu lub w AS.
-
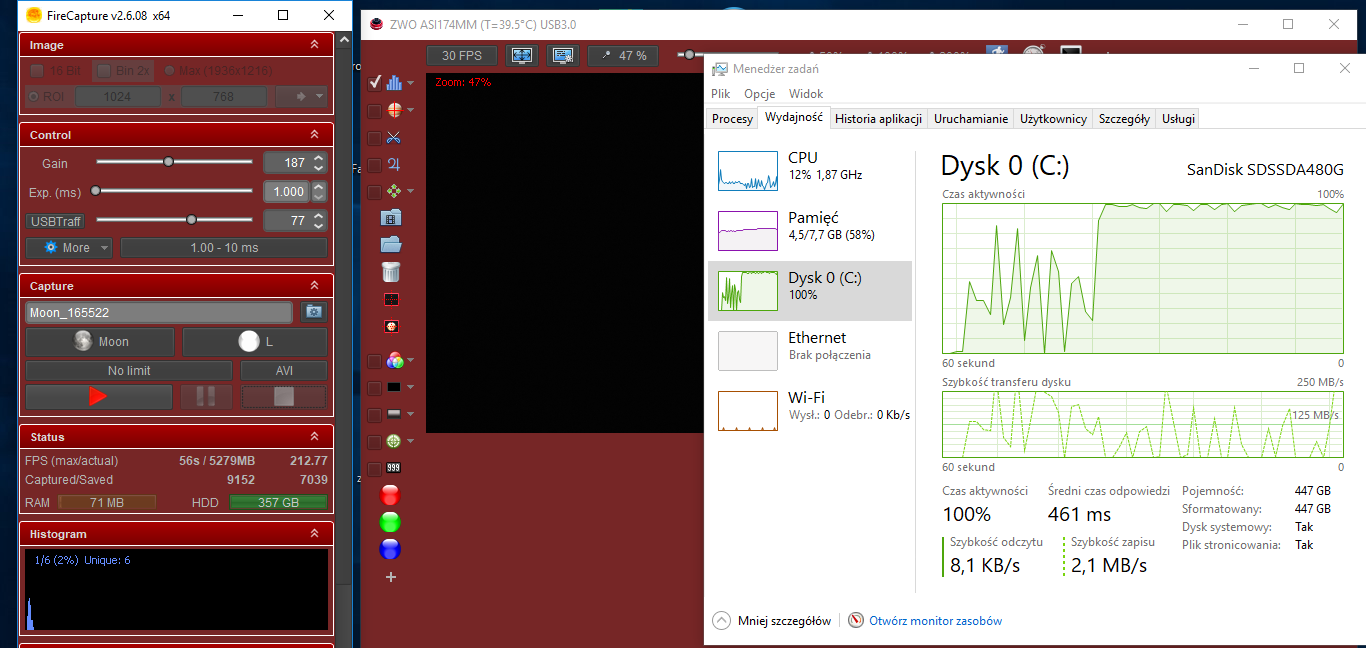
Test na felernym dysku, ASI174, ROI 1024x768 (żeby trochę ograniczyć dane), wymagane ok 200 MB/s. Widać wyraźnie, że dysk się jakby "zacina". Zapisuje z normalną prędkością w krótkich pikach, a poza nimi strasznie zamula.
-
37 minut temu, Limax7 napisał:
Moim zdaniem to nie wina dysku
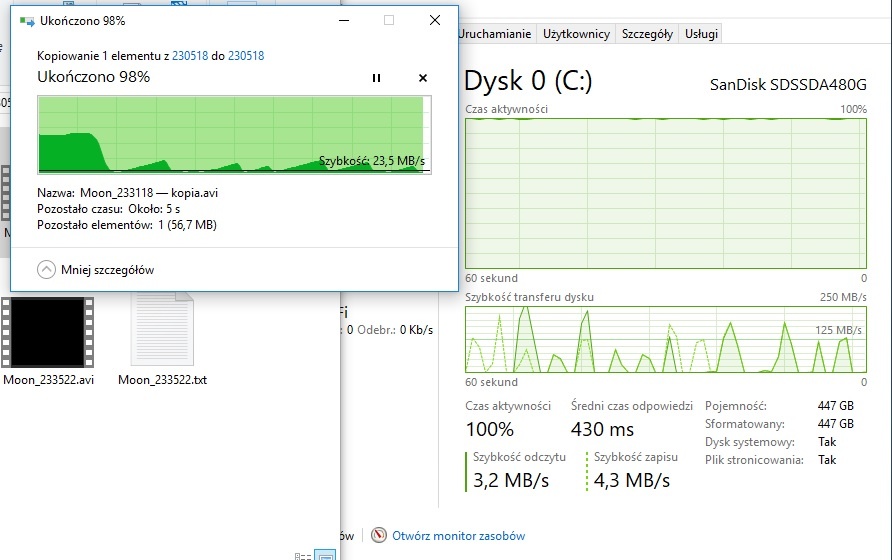
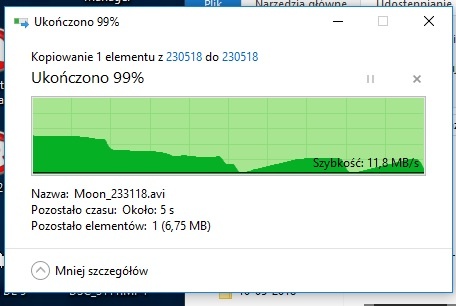
Jeśli to nie wina dysku, to dlaczego zwykłe kopiowanie pojedynczego pliku działa tak?
-
7 godzin temu, Behlur_Olderys napisał:
Czy sprawdzałeś z innym, najlepiej sprawdzonym dyskiem? Jeśli operacje o których mówisz będą działać tak samo wolno na dwóch różnych dyskach to możesz wykluczyć dyski z równania
Innym dyskiem w tym samym komputerze? Nie za bardzo mam, jak to sprawdzić niestety. Za to na innym komputerze, ze sprawnym dyskiem wygląda to tak (ASI174 max rozdzielczość, 128 FPS, średnio 300 MB/s):
-
Mi to właśnie PS inaczej wyświetla zdjęcia mono, ale to on kłamie, bo reszta programów pokazuje ciemnej. Kiedyś nawet znalazłem opcje, która to zmienia, ale nie dało się dać na zero. Nie ogarniam, dlaczego i po co tak jest.
-
17 minut temu, Tayson napisał:
jak laczysz montaz z PC?
cos trzeba klikac na pilocie, czy dziala od razu po podlaczeniu przez konwerter rs232/usb?
Kabelek RS232 + konwerter. Gniazdko jest w pilocie. Nic nie trzeba robić, włączasz montaż i od razu działa z PC. Nie ma żadnej inicjalizacji pilota, jak w SW (jest GPS i sam wszystko wie).
Postaram się zrobić niedługo recenzję tego montażu i opisać wszystko.
Dziś podstawieniowym odpuścić testy i zrobić wreszcie jakieś zdjęcie
Trzaskam Półksiężyc na 2 min klatkach bez guide na APO65Q i ASI1600.
-
Godzinę temu, Tayson napisał:
A jak będzie się gieła tuba pod ciężarem nowego wyciągu + nowa matryca?
Pesymistyczna wizja.
Bez przesady. 6" jest jednak sztywniejszy, niż 8". Mniejsza średnica przy takiej samej grubości blachy.
-
7 minut temu, _Spirit_ napisał:
Nie to . Poszukaj Smart Test.
Chyba wszystko w normie...

-
10 godzin temu, wessel napisał:
@Mateusz, poproszę o darka i biasa 180 secs na unity i -20 na matrycy jak możesz.
Obiecane klatki: https://drive.google.com/drive/folders/1rX14CWdabYgB4rJFpyqa4OHsxJcpi4O9?usp=sharing
Zrobiłem od razu test na USB3.0 i 2.0. Faktycznie na 2.0 AMP glow jest ciut większy, ale nie jest to duża różnica (spodziewałem się większej).
-
17 godzin temu, AdamK napisał:
Dzięki Mateusz. Niestety będę musiał wszystko odłożyć na bok, bo dziś padł system Win10 w nowym laptopie! Nie chce się uruchomić i ciągle każe wpisać klucz odzyskiwania BitLocker. Potem robi jakby samonaprawę i tak w kółko. Są jeszcze opcje zaawansowane z których kazda i tak powoduje powrót do punktu wyjścia... Jestem prawie załamany bo w perspektywie mam nie wiadomo jak długą naprawę, ale przede wszystkim utratę wszystkich danych, w tym również tego ostatniego przedstawionego tu zdjęcia... Nie wiem co dalej z tym. Może ktoś podpowie jakieś rozwiązanie?
Bardzo mi przykro. Niestety, z Bitlockerem nie miałem do czynienia, więc nie umie pomóc. Gdybyś nie używał tego mechanizmu, to starczyłoby wpiąć dysk do PC i skopiować dane. Ale w obecnej sytuacji nie wiem, czy jest możliwe na innym kompie odszyfrowanie tego dysku?








Mini komputer
w ATM, DIY, Arduino
Opublikowano · Edytowane przez MateuszW
Strach przed aktualizacjami") Ale w wersji Pro nie ma problemu z ich wyłączeniem.
Ale w wersji Pro nie ma problemu z ich wyłączeniem.
Myślę, że dlatego, że mało kto umie obsługiwać linuksa, a tym bardziej czuje się w nim swobodnie") Poza tym, nie wszystko na nim działa, choć całkiem sporo.
Poza tym, nie wszystko na nim działa, choć całkiem sporo.