bartolini
-
Postów
3 359 -
Dołączył
-
Ostatnia wizyta
Typ zawartości
Profile
Forum
Blogi
Wydarzenia
Galeria
Pliki
Sklep
Articles
Market
Community Map
Treść opublikowana przez bartolini
-
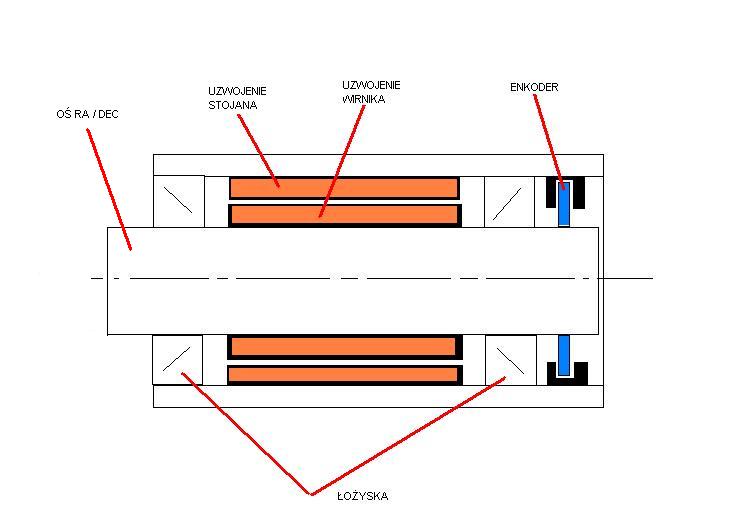
Ten montaż to taka przyszłościowa konstrukcja. Otóż, z tego co chłopaki piszą i z mikrej ilustracji wynika, że zastosowali tam bezpośredni napęd i pomiar położenia osi ("direct drive"). Taka technologia jest stosowana w nowych konstrukcjach obrabiarek. Ten montaż nie ma ślimacznic, nie ma ślimaków, ani nawet jednego, maciupkiego kółeczka zębatego. Oś DEC cz RA jest poprostu wałem silnika, na tym wale jest też osadzony enkoder. Wygląda to mniej więcej tak: Czyli jedna oś składa się, z powiedzmy 4 ruchomych części: Osi z nasadzonym wirnikiem i częścią enkodera, 2 łożysk i obudowy ze stojanem silnika i drugim kawałkiem enkodera. Nie ma przekładni, sprzęgieł - nie ma backlashów, drgań ciernych, innych dupereli. Jednym czynnikiem mogącym wprowadzać PE są łożyska. Jeżeli faktycznie zastosowali napęd bezpośredni to parametry, które podają w specyfikacji są jak najbardziej do uzyskania. Plusem tego rozwiązania jest super precyzja, zero luzu zwrotnego i problemów z przejściem fotografowanego obiektu przez punkt górowania, mało ruchomych części, dynamika goto o rząd, albo i dwa rzędy wielkości lepsza niż w montach z przekładnią ślimakową i servami . No i na koniec to, że można takiemu montażowi zasadzić laczka z rozbiegu w czasie pracy i nic w nim nie uszkodzimy - najwyżej się tuba albo dovetail pognie - jednym skutkiem dla montażu będzie pewnie zgłupienie sterownika. A minusy to, że tu rządzi elektronika i software - sterownik dla takiego monta to już ma procek klasy pewnie gdzieś pentium II albo i III. Przy tym sterowaniu krokowce to prehistoria, a servo napędzające przekładnię ślimakową to średniowiecze. Prądu żre o wiele więcej niż montaż z przekładnią ślimakową, bo silnik musi "trzymać" cały setup - nie ma samohamowności przekładni ślimakowej. Wydaje mi się, że jest to idealne rozwiązanie dla zdalnych obserwatoriów - tam naprawdę nie ma się co zepsuć czy rozregulować.

-
Tylko, że tutaj pojawia się problem - owce są pasterzami owiec... same mają pasterzy, którzy też są owcami itd... Druga sprawa, to, to na ile pasterz może ingerować (na ile jest kompetentny) w życie swoich owiec? Akurat przechodzę przez motyw nauk przedmałżeńskich. Polska jest ponoć jedynym krajem, w którym obowiązuje ten zwyczaj...
-

przesuniecie ku czerwieni
bartolini odpowiedział(a) na Kaladan temat w Społeczność AP (Rozmowy o wszystkim)
Szczerze wątpię... Kaladan, a co to jest ten most świetlny? -
"...Bardziej mnie interesuje, jesli wjade w jakas gromade galaktyk to ktorym okularem zobacze slabsze obiekty?" Naglerem lub pentaxem 7mm... Teha ma newtona o bardzo podobnych parametrach i ma pentaxa 10mm - pewnie porównywał z naglerem o podobnej ogniskowej. Może coś poradzi...
-
W wynikach porównań nagler vs. pentax przeważają dwa stwierdzenia: 1) XW jest lepsze w wolniejszych refraktorach - nagler w szybkich newtonach 2) Do 10mm pentax - powyżej nagler. Ta relacja jest silniejsza od pierwszej
-
super APO vs profesionalny teleobiektyw
bartolini odpowiedział(a) na Marcinos temat w Dyskusje o sprzęcie
Akurat z profesjonalnych stałek 400/5.6 ma budowę najbardziej zbliżoną do astrografu - 7 soczewek w 6 grupach. Kiedyś znalazłem schemat budowy - zdaje się, że z przodu jest triplet z jedną soczewką UD a z tyłu 4-soczewkowy "flattener-reducer" z drugą. -
Spotkanie integracyjne grupy wrocławskiej
bartolini odpowiedział(a) na Geminiplus temat w Spotkania, zloty, wyjazdy i imprezy
Tfuu!!! do 2:30. Coś ostatnio mam jakieś dziury czaso-przestrzenne - spotkanie organizowałem w grudniu z terminem na listopad.... -
Spotkanie integracyjne grupy wrocławskiej
bartolini odpowiedział(a) na Geminiplus temat w Spotkania, zloty, wyjazdy i imprezy
Było bardzo fajne spotkanie, jako inicjator cieszę się, że zebrało się trochę osób: Teha, oskar, rerekumkum, exec, wimmer i ja. W związku z dość dużym tłokiem w lokalach na samym rynku wylądowaliśmy w "czeskim filmie", gdzie oddaliśmy się dyskusji na tematy różne - astro i nieastro - przy oranżadzie oczywiście Z Tehą i wimmerem dotrwaliśmy do godziny ~1:30 i pomaszerowaliśmy do domów. Po wyjściu z lokalu okazało się oczywiście, że na niebie jest luta... I to tyle w telegraficznym skrócie. Do zlotu w Bieszczadach zostało jeszcze 4.5 miesiąca, więc podejrzewam, że w międzyczasie zorganizujemy jeszcze jakieś spotkanko po nowym roku. Mam nadzieję, że frekwencja będzie conajmniej taka jak w zeszłą sobotę - lub większa -
Spotkanie integracyjne grupy wrocławskiej
bartolini odpowiedział(a) na Geminiplus temat w Spotkania, zloty, wyjazdy i imprezy
No i po pogodzie. Właśnie jadę koło sobótki - chmurwy na niebie. Czyli spotykamy się na rynku. -
Spotkanie integracyjne grupy wrocławskiej
bartolini odpowiedział(a) na Geminiplus temat w Spotkania, zloty, wyjazdy i imprezy
Dzwoniłem do NASA, rozmawiałem z Danielem G. i powiedział, że przełoży start atlantisa na niedzielę. No to teraz ta pogoda... Jeżeli będzie luta, to ja też jestem za minizlotem na tąpadłach - czyli tradycyjnie mcdonalds 19:30 - mogę wziąść jedną osobę z niewielkim sprzętem i wracam około 0:30~1:00 -
Spotkanie integracyjne grupy wrocławskiej
bartolini odpowiedział(a) na Geminiplus temat w Spotkania, zloty, wyjazdy i imprezy
Będę pewnie parę minut przed 19:30, moja roześmiana facjata - jak z awataru jest powszechnie znana. Damy radę, a wy młodzi to tylko ten komputer i telewizor, komputer i telewizor, zamiast gdzieś wyjść albo coś... -
Philips, jeżeli spotykasz się z określieniem "servo" to znaczy, że masz sprzęgnięty napęd i jakiś pomiar położenia: enkoder, potencjometr czy co tam innego, a silnik może być: DC, hydrauliczny, spalinowy czy nawet parowy. To nie chodzi o jakiś konkretny rodzaj napędu lub sposobu pomiaru położenia, tylko ideę. Silniki gemini goto mają sprzęgnięte enkodery. I do napędu montażu muszą być, bo to są silniki DC. Ale możesz sobie jeszcze dołożyć enkodery na osiach (digital circles), które umożliwiają ustawienie ręczne na dany obiekt bez konieczności odczytu ze skal wygrawerowanych na osiach. (coś jak zegarek wskazówkowy, a ten wyświetlaczem ciekłokrystalicznym) "The Gemini system will also accept inputs from optional shaft encoders (the same as used in Losmandy digital setting circles), which allow the telescope to be positioned by hand, yet still retain pointing information. Hand movement of the telescope will drop positional accuracy to that of the shaft encoders, but this can be easily refined using a quick synchronization or alignment position from a nearby object, which will return the system to full motor encoder accuracy." Takie enkodery na osiach pojawiły się jeszcze zanim wprowadzono goto, także to patent stary jak świat. Na przykład NJP z enkoderami z 1988 roku: http://astrosurf.com/re/taka_telescopes_1988.jpg PS wiki z mechatroniki do przestudiowania http://hades.mech.northwestern.edu/wiki/index.php/Main_Page niestety tylko po angielsku EDIT: O widzę Mario mnie ubiegł EDIT 2: Do Marcina G.: Z tego co sie orientuję to najsensowniejszym wyjściem jest zabawa w Autostara. Jak chcesz dowiedzieć się więcej, to polecam grupę Roboscope na Yahu: http://tech.groups.yahoo.com/group/RoboScope/
-
Spotkanie integracyjne grupy wrocławskiej
bartolini odpowiedział(a) na Geminiplus temat w Spotkania, zloty, wyjazdy i imprezy
Sobota zbliża się wielkimi krokami, więc proponuję zbiórkę pod pręgierzem o godzinie 19:30. Poczekamy 15 minut na maruderów i zdecydujemy do jakiego lokalu się udać. Jeżeli ktoś pojawi się później - wysyłać sesemesa do mnie - odpowiem, gdzie jesteśmy. -
Ciekawa strona: http://astrosurf.com/re/ Bardzo dużo zdjęć, ilustracji, różnych materiałów o tematyce astro. Polecam!!!
-
Spotkanie integracyjne grupy wrocławskiej
bartolini odpowiedział(a) na Geminiplus temat w Spotkania, zloty, wyjazdy i imprezy
Hmmm... Z jednej strony można by "upiec dwie pieczenie na jednym ogniu", ale z drugiej strony trochę osób nastawiło się już na termin: sobota, 8.12. Wydaje mi się, że jak będą kalendarze to będzie można, albo podjechać do Tomka do pracy, albo zrobić nawet jakąś zbiórkę większej grupy osób i rozdać kalendarze. -
Spotkanie integracyjne grupy wrocławskiej
bartolini odpowiedział(a) na Geminiplus temat w Spotkania, zloty, wyjazdy i imprezy
No właśnie mam na mikołaja dostać, luba kupiła, ponoć od jakiegoś handlarza na niskich łąkach... -
Spotkanie integracyjne grupy wrocławskiej
bartolini odpowiedział(a) na Geminiplus temat w Spotkania, zloty, wyjazdy i imprezy
Więc umawiamy się wstępnie na 7.11-piątek lub 8.11-sobota. Z wskazaniem na sobotę. PS Właśnie rozmawiałem z Dave'm i PiotrkiemS i zapowiedzieli, że w sobotę 8.11 się zjawią - Ciekawe jak Frebert i PiotrZ? -
Spotkanie integracyjne grupy wrocławskiej
bartolini odpowiedział(a) na Geminiplus temat w Spotkania, zloty, wyjazdy i imprezy
Może jakaś powtórka spotkania integracyjnego? Do kwietnia nie ma żadnych zlotów, pogoda tragiczna, może zorganizowalibyśmy jakieś spotkanko mikołajkowe przy piwku - bezalkoholowym oczywiście ? Przedstawcie swoje propozycje terminów, to ustalimy, w który dzień się można by się spotkać. Jak dla mnie każdy termin od dzisiaj do następnego piątku włącznie pasuje (oczywiście nie maraton ) -
jaki material do wyczernienia optyki
bartolini odpowiedział(a) na Kaladan temat w Dyskusje o sprzęcie
Najbardziej super-bajer-profesjonalny produkt jaki kiedyś znalazłem: http://www.edmundoptics.com/onlinecatalog/...d=1502#Products Niestety raczej nie nadaje się do newtonów - wątpię żeby był wodoodporny -
Jak w temacie. Mój okular jest w stanie bez zastrzeżeń, optyka bez żadnych rysek, kapsle, pudełko jest. Zamieniłbym na dłuższego LVW. Strony poniosą koszta przesyłki swojego okularu. W razie dodatkowych pytań proszę o info na PW lub komórę. Pozdrawiam
-
Cassegrain 250/4500 Uniwersał do podrasowania
bartolini odpowiedział(a) na Sergeant temat w Dyskusje o sprzęcie
Faktycznie wyciąg i kątówka wygląda koszmarnie - jak od kowala -
Cassegrain 250/4500 Uniwersał do podrasowania
bartolini odpowiedział(a) na Sergeant temat w Dyskusje o sprzęcie
Na oko, to chłop w szpitalu umarł Najlepiej doradzi ktoś, kto ma Mewlona... -
Cassegrain 250/4500 Uniwersał do podrasowania
bartolini odpowiedział(a) na Sergeant temat w Dyskusje o sprzęcie
Musi być inna... W dallu-kirkhamie wtórne jest sferyczne - tak na prawdę nie ma znaczenia jak jest pochylone (jak w newtonie), tylko czy środek tej sfery leży na osi optycznej lustra głównego i tulei wyciągu. Jeżeli lustro główne w tym U jest zamocowane na centralnym otworze i jego oś jest ustalona względem tulei wyciągu, to kolimacja sprowadza się do spozycjonowania sferycznego lusterka wtórnego. Coś w ten deseń: Pozostaje tylko kwestia jak kręcić śrubkami, żeby przesunąć środek sfery w danym kierunku...
-
Cassegrain 250/4500 Uniwersał do podrasowania
bartolini odpowiedział(a) na Sergeant temat w Dyskusje o sprzęcie
jeśli chodzi o atm cassegrainów, to jedyną osobą na forum, o której wiem, że zrobiła takiego i to łącznie z optyką jest kolega jaszczurek... -
Cassegrain 250/4500 Uniwersał do podrasowania
bartolini odpowiedział(a) na Sergeant temat w Dyskusje o sprzęcie
Przeliczyłem twoje dane i wychodzi masa rury około 11-12kg - trudno powiedzieć jaką to PCV ma gęstość... (OT: jeszcze trudniej wrzucić excela, nawet spakowanego )