

MateuszW
-
Postów
9 964 -
Dołączył
-
Ostatnia wizyta
-
Wygrane w rankingu
41
Typ zawartości
Profile
Forum
Blogi
Wydarzenia
Galeria
Pliki
Sklep
Articles
Market
Community Map
Odpowiedzi opublikowane przez MateuszW
-
-
2 godziny temu, Przemo23 napisał:
To i Ja dorzucę jakiś fotomontaż z kopca Krakusa.
Kompozycja z dwóch ujęć - przepalony księżyc zastąpiony poprawnie naświetloną fotką.
Ale rozmiar i pozycja Łysego się zgadza? Tzn to tylko HDR? Jeśli tak, to chylę czoła za wyczucie ustawienia się do takiego kadru
")
-
Niestety, dwa maximy na jednym kompie nie pójdą wprost. Tzn można maxima odpalić dwa razy i działa, ale każdy wczytuje te same ustawienia (np używana kamera, focuser itp), więc trzeba to zmieniać na nowo, co jest bezsensowne. Maszyna wirtualna to faktycznie zgrabne obejście problemu, o ile tylko komp jest jaki taki, bo to troszke procka potrzebuje.
-
14 minut temu, Duser napisał:
Druga sprawa jest poważniejsza. Zauważyłem że zdalny pulpit ma pierwszeństwo w transferze danych w stosunku do innych procesów działających w tle na zdalnym komputerze i jeżeli są jakiekolwiek opóźnienia w działaniu sieci (częste przy WiFi) , reszta działań w tle czeka na dokończenie przesyłania danych pomiędzy komputerami i dokończenie update'u ekranu.
Objawia się to w praktyce zakłóceniami w pracy programu guidującego, który "zawiesza się " na chwilę, czekając na dokończenie transferu np jakiejś klatki zdjęcia w pełnej rozdzielczości ( spora ilość danych) , co powoduje znaczny "odjazd " prowadzącej gwiazdy i de facto zepsucie zdjęcia.
Tak, ja też zauważyłem ten problem z pulpitem Windows, co skłoniło mnie do definitywnej rezygnacji na rzecz teamviewera. W moim sposobie działania wifi jest czesto niestabilne lub całkiem znika, wiec te zwiechy były niedopuszczalne.
-
Hmm, Pixa niewiele znam, ale odnośnie formatów mam takie odczucia. Nie widzę za bardzo sensu trzymania w fits pośrednich etapów obróbki. Fits używam jako format zapisu z kamery, ale już od stackowania zastępuje go tif, aż do końca (no i jpeg do publikacji). Dlaczego tif? Bo jest to format uniwersalny, działa w zasadzie każdym programie, może być 16 lub 32 bitowy i niekompresowany. Fits to format stworzony jako odpowiednik rawa dla kamer, czyli ma zachowywać sygnał z kamery w czystej postaci. Stąd zupełnie nie klei mi się kupy trzymanie w fits pośrednich zdjęć, które w żaden sposób nie są surowym sygnałem z matrycy. Zasadniczo poza mniejszą uniwersalnością fits (w sensie, że nie każdy program go czyta) i konfliktem "filozoficznym" z używaniem tego formatu wbrew przeznaczeniu, nie widzę innych przeciwwskazań, aby był to pośredni format obróbki.
Taki jest mój pogląd i chętnie poznam Twój punkt widzenia Wessel, bo na pewno jest coś, czego tu nie dostrzegam, a co może faktycznie przeważa na stronę fitsa. Podyskutujmy o tej sprawie, skoro jest okazja
-
 2
2
-
-
Miałem już jeździć na wszystkie zloty od czasu mojego debiutu ostatnio, ale niestety ten wrześniowy muszę odpuścić. Za dużo się w te wakacje dzieje, trzeba będzie w końcu odetchnąć...
-
@szuu, czy ta grafika ma dodatkowo sugerować, że Księżyc widać tylko w nocy?
-
1
-
-
Ja znalazłem swego czasu coś takiego:
Najlepszy stosunek pojemności do masy i cena też dobra. Planuję kupić do setupu mobilnego, ale na razie nie miałem w rękach. Wyjścia 12 i 20V o dużej obciążalności to jest to.
-
8 minut temu, JaLe napisał:
To jeszcze zrób testy z guidem, i nie koniecznie przyjmuj się tymi szybkimi korektami (czyli 1/2s) - proponuję co 1 s.
Testy z guide były, tylko nie zapisałem logów... Generalnie na 1/2 s pracowało to nieźle, 1 s już gorzej (czasem nie zdążył z korektą w porę).
-
12 minut temu, JaLe napisał:
Tak, ale te male sinusoidy nie są tak zabójcze dla obrazu jak te duże i to na nich bym się skupił.
Nie no, właśnie są. Te drobne generują mi szybkozmienny błąd o amplitudzie aż 5", czyli tego samego rzędu, co moja mało wymagająca skala z teleobiektywem. Duże sinusoidy dają co prawda znacznie większy błąd, ale jest on dużo wolniejszy i łatwy do wyguidowania (a raczej z guidingiem to ma pracować docelowo).
Tak czy siak trzeba będzie wyeliminować obie składowe. Już sprawdziłem bicie na małych zębatkach i wychodzi, że w Dec jest dużo lepiej wykonana, więc je zamieniłem. Sam wałek silnika też ciut bije, ale zauważalnie mniej, niż sama zębatka.
Przede wszystkim zwiększę prąd na silniku do maxa i powinno być dużo lepiej.
Ale GT2 tak czy siak planuję kupić, tylko muszę je znaleźć w sklepie...
-
1 minutę temu, JaLe napisał:
Pytałem o to jak było wcześniej, bo mielibyśmy pierwotny wykres do którego można byłoby się odnieść. Co zaś do dyskretyzacji to są to te najmniejsze skoki i z tym nic nie zrobimy, bo to specyfika pracy układu mechatronicznego. Natomiast sinusoida, która opisałeś będzie miała zawiązek z biciem i nad tym warto się pochylić. Tak jak przypuszczać naciąg paska, tez może mieć na to wpływ, ale również wałek silniczka i w szczególności same zębatki.
Za kilka dni zrobię kolejne testy, sprawdzę też na oryginalnym napędzie jak to działa.
Nie do końca mnie rozumiesz. Te małe skoki, które widać na wykresie to w rzeczywistości są drobne sinusoidy. Minimalne skoki samego silnika są daleko drobniejsze. A bicie powoduje powstanie sinusoidy kolejnego rzędu, tej o okresie 176 sekund (czas obrotu małego kółka).
-
Dnia 24.07.2017 o 06:43, ryszardo napisał:
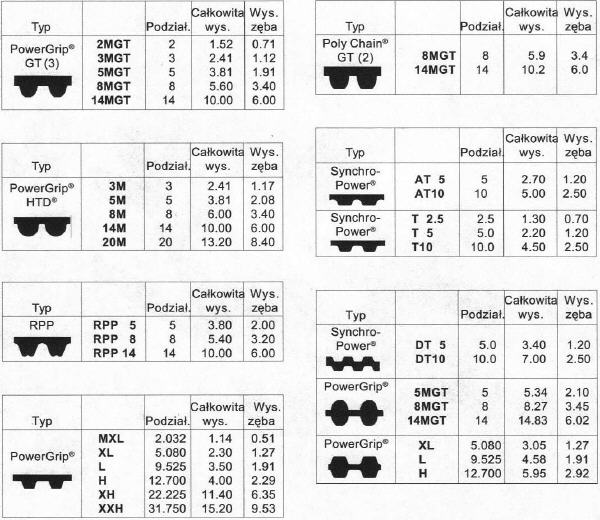
Jeżeli stosujesz pasek z zębami trapezowymi - to jest to ( między innymi) luz międzyzębny na przekładni. Potrzebne są przekładnie typu GTD z zębami półokrągłymi.
edit: poza tym dokładność wykonania przekładni GTD jest dużo wyższa - tylko te są polecane do pozycjonowania.
No tylko że paski HTD też mają zęby półokrągłe, a nie trapezowe...
 Dnia 24.07.2017 o 07:30, JaLe napisał:
Dnia 24.07.2017 o 07:30, JaLe napisał:Na wykresie są widoczne dwa zjawiska: dyskretyzacja ruchu i bicie osiowe. Czy przed "opaskowaniem" było gorzej ?
Dyskretyzacja w jakim sensie? Obserwując te drobne oscylacje (o okresie 15 sek) na krótkich klatkach guidera widać bardzo wyraźnie, że to po gęsta prostu sinusoida.
Hmm, chyba że to jednak wina silnika, tzn jest słaby i ma siłę ruszyć paskiem tylko co ząb? Może faktycznie tu jest pies pogrzebany, bo celowo ograniczyłem prąd na silniku do połowy, myśląc że da radę... Cóż, spróbuję przy pełnej mocy silnika.
Tylko że stosując szybki guiding na czasie 0,3 sekundy udało mi się to prawie całkowicie wyguidować. Czy to nie zaprzecza tej teorii?
Zastanawia mnie jeszcze kwestia naciągu paska. Naciągnąłem go raczej mocniej, niż słabiej. Może ma być luźniej? W zasadzie to mimo sporego naciągnięcia i tak pojawia się widoczny backlash przy zmianie kierunku - pasek się "naciąga" w drugą stronę... Może lekarstwem na to są te dodatkowe kółka, którymi się dociska pasek od zewnątrz np w beltmodach do HEQ5 itp.
Przed opaskowaniem były oryginalne silniki z zębatkami. Nie pomyślałem, żeby zbadać ich PE, ale zrobię to, bo wciąż je mam.
Dnia 24.07.2017 o 14:59, sidiouss napisał:Ja do swojego eq3-2 zamontowałem takie zębatki GT2, odpowiednio 60 i 15 zębów -
http://s.aliexpress.com/UN3um6VJ
Do tego pasek, jeden gotowy, drugi trochę dłuższy klejony własnoręcznie i jestem zadowolony z zestawuDzięki, ale muszę znaleźć coś na szybko. Tzn muszę mieć ten napę przed wylotem na zaćmienie tj przed 18 sierpnia
A coś tych GT2 jest gorszy wybór, niż HTD.
-
Jeśli nie zależy Ci na mobilności, to brałbym EQ5 zamiast Adventurera. Podobne prowadzenie, a wygoda użytkowania dużo wyższa, no i nośność większa na przyszłość.
-
Ciemniejsze tuby dają z tym samym okularem mniejszą źrenicę wyjściową, co istotnie zmniejsza widoczność cienia. Sam rozmiar LW jest tu na drugim miejscu.
Przy okularach krótszych niż 10 mm cień powinien być znośny, no ale to już kwestia tolerancji
-
Cień LW, który widzisz to kwestia źrenicy wyjściowej okularu i Twojej źrenicy w oku. Obserwując w dzień, źrenica oka jest mocno skurczona. Nie jest w stanie pokryć całego obrazu, który generuje okular źrenica wyjściowa). Im większa jest ta dysproporcja, tym bardziej widać cień LW. Niestety, długie okulary będą dawały taki efekt w dzień. W nocy, gdy Twoja źrenica się rozszerzy, efekt zniknie całkowicie.
To wszystko przy założeniu, że masz poprawną ostrość
No ale z treści posta wnioskuję, że nie jesteś całkiem zielony -
Dnia 25.07.2017 o 15:19, Adm2 napisał:
Ale jeszcze musiałem poczytać i zrobić małą modyfikację oryginalnego drivera, bo 1 krok gubił co kilka sekund i stawał na ułamek sekundy. Jakąś " decay mode" trzeba było zmienić na czipie.
Ściśle mówiąc, on nie gubi kroków, tylko bardzo nierówno pracuje. Zmiana decay mode poprzez dolutowanie tego kabelka znacznie wyrównuje pracę, ale pojawia się właśnie problem piszczenia i kwiczenia silnika. Jednak poza efektami artystycznymi nie powoduje to utraty precyzji, nie ma się co przejmować. Ten tryb tak ma.
-
2
-
-
Hej
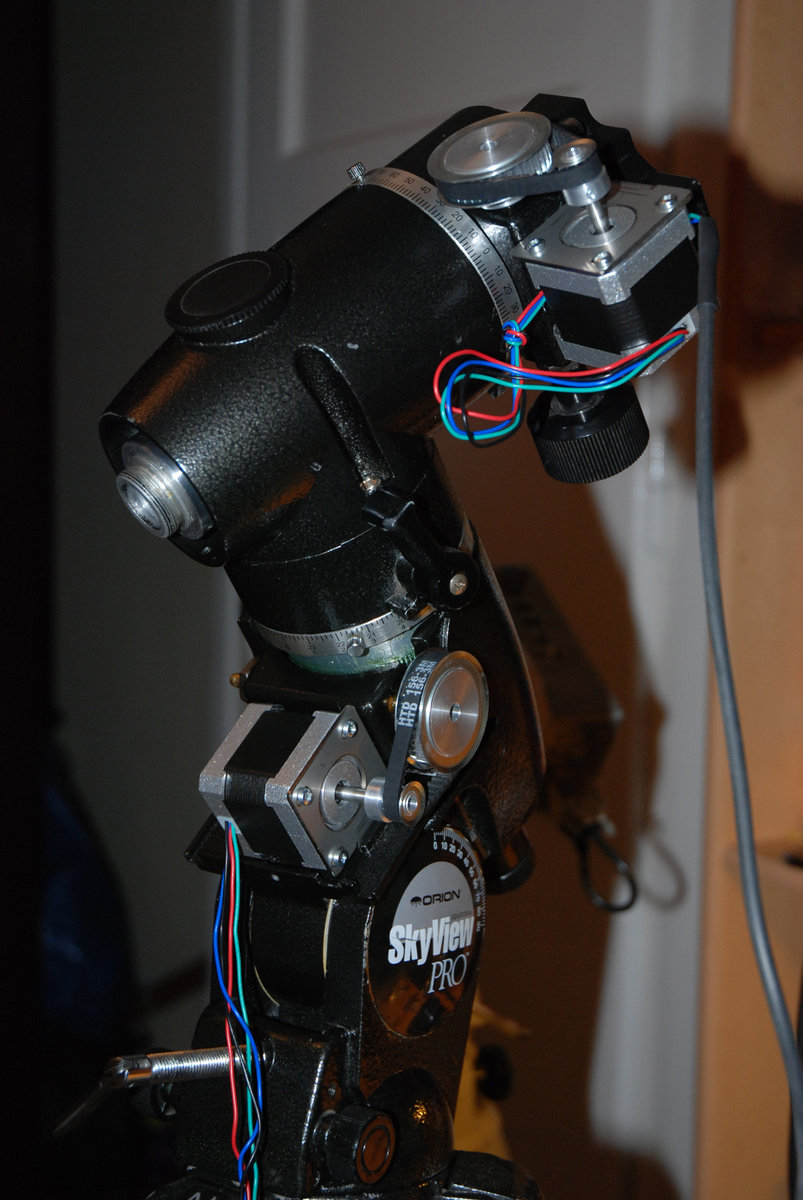
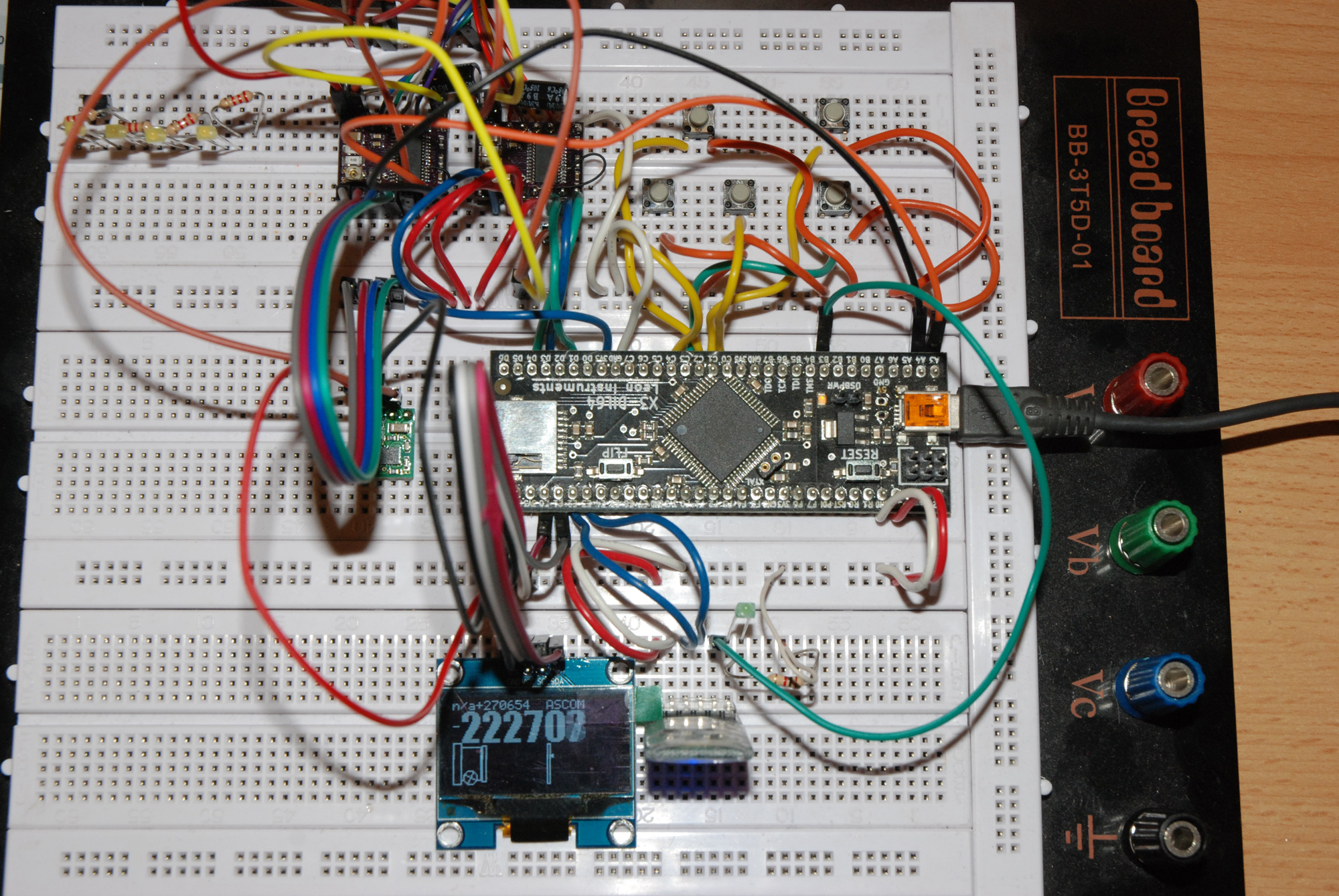
Za mną pierwsze testy napędu EQ5 na bazie DreamFocusera:
Wnioski są nieco zaskakujące. Bałem się, że źle policzyłem prędkości, driver silnika będzie za mało płynny, będzie za mało kroków itp, tymczasem od tej strony wszystko było cacy. Napęd działał bez szwanku. Słabym punktem okazała się przekładnia paskowa.
Zastosowałem pasek 3M 06 i kółka 40 oraz 12 zębów. 3M stosują chyba praktycznie wszyscy i nikt się nie skarżył. Powstało przecież już tyle napędów ATM, opaskowań "domowych" itp. Ale mój pasek jest inny, jest kiepski...
Dla informacji: przekładnia ślimakowa ma 1:144, zębatki pod pasek to odpowiednio 40 i 12 zębów, silnik ma 200 kroków i 32 mikrokroki.
Do rzeczy. Okres ślimaka RA wynosi 598 sekund. Na osi ślimaka jest kółko o 40 zębach. Po podzieleniu wychodzi 14,95 sekundy. I właśnie o dokładnie takim okresie jest nowa składowa błędu okresowego. Amplituda tej składowej to ok 5". Czyli mam sinusoidę skaczącą góra dół o 5" kątowych o okresie ok 15 sekund. To bardzo źle.
Tak to wygląda w PEC Prep:
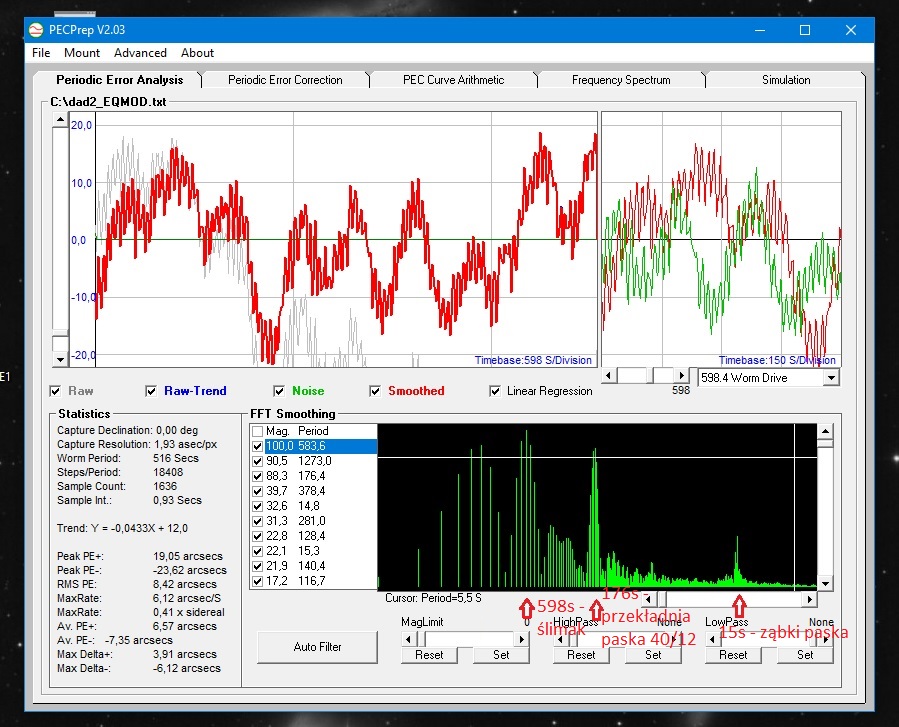
Składowa, o której piszę to ta drobna "harmonijka" na wykresie. Zaznaczyłem również odpowiadający jej pik na FFT (ząbki paska).
Jest jeszcze dość wyraźna oscylacja o okresie ok 176 s. Idealnie pokrywa się ona z przełożeniem na pasku - 40 i 12 zębów, co daje 1:3,333x, natomiast 598/176 = 3,39. Tu akurat wiem, co jest problemem - kółka są przymocowane byle jak, "kołyszą się" nieco na osi. Trzeba to będzie dokładniej zamocować.
Generalnie najbardziej dotkliwe są te oscylacje o amplitudzie 15 sekund. Da się to w miarę wyguidować, ale wymaga to bardzo szybkich korekt - rzędu 2x/sek. Czuła ASI174 daje radę, no ale to trochę dziwne takie szybkie guidowanie...
Generalnie całość jest na razie skręcona byle jak, a ustawienie na biegun było bardzo zgrubne. No ale błędy, o których piszę są ewidentnie spowodowane przekładnią paskową.
Co o tym myślicie? Dlaczego ten pasek tak kiepsko działa? Czy znacie źródło kół zębatych lepszej jakości? Ja kupowałem takie po kilka zł...
-
3 godziny temu, AMR napisał:
jak potrzebujesz, mam dwa komplety oryginalnych silników do EQ5
leżą i kwiczą, a jak mogą się przydać przy "produkcji" ... ")
Na razie działa to świetnie na silnikach od DF. Masz te od wersji SynScan? Hmm, pewnie nie zaszkodziłoby się im przyglądnąć
2 godziny temu, RMK napisał:Głowica oprócz standardowego napędu osi montażu Ra i Dec miała posiadać regulowaną platformę oraz sterowanie Alt/Az w celu pełnej automatyzacji pozycjonowania.
Hmm, jak dotąd czytałem tylko o jednej próbie realizacji tego zagadnienia, czyli napędu alt-az do bieguna. Był to jednak bardzo duży montaż, a z tego dodatkowego napędu nic nie wyszło
Faktycznie chyba nie istnieje jeszcze nic tego typu (choć kto wie, co ATMowcy zza wielkiej wody wymyślili). Pojawia się tu kluczowe pytanie - dlaczego?
a)jest to trudne i nikomu się jeszcze nie udało
b)jest to za drogie, żeby miało sens
c)jest za duże i za ciężkie, żeby dało się zastosować
Powód pierwszy bym odrzucił od razu no i pozostają te mniej optymistycznie napawające... Jeśli chodzi o mój punkt widzenia, to zgodzę się, że bardzo chętnie bym czegoś takiego użył. Ale obawiam się, że może się to okazać faktycznie nieopłacalne, szczególnie do małych montaży. No i w takim adventurerze to zapewne powiększyłoby go ze dwa razy, co nie ma sensu. Myślę, że można by zrobić coś takiego dla montaży pokroju HEQ5, NEQ6. Taki nowy klin paralaktyczny do podmiany. No bo robienia całego montażu to ja się nie podejmuję
2 godziny temu, RMK napisał:Włączasz. Oprogramowanie sterując silnikami platformy Alt-Az z zamontowaną głowicą wykonuje ekspozycje w różnych częściach nieba za pomocą kamery wyrównując oś montażu na biegun (nie musi być widoczny). Kolejny etap to wybór obiektu i obrót Ra i Dec do właściwej pozycji czyli GoTo. Później już "tylko" prowadzenie i fotografowanie. Cztery silniki i komplikacja sterowania nie jest mała ale przynajmniej nie trzeba walczyć z niedokładnością ręcznego ustawienia na biegun, gdzie przy małych mobilnych montażach nieostrożny ruch ręką wymusza ponowną regulację i oczywiście nie byłaby potrzebna widoczność bieguna.
Jakby nie patrzeć, mamy na rynku rozwiązanie PoleMaster, które uwalnia nas od konieczności patrzenia do lunetki (ale kręcić musimy śrubami nadal ręcznie), mamy też rozwiązanie Meade StarLock, które uwalnia nas od konieczności alignowania GOTO. Rozumiem, że marzy Ci się połączenie tych dwóch + napęd osi polarnej + zabudowanie tego w montażu
Cóż, to bardzo rozbudowany projekt. Byłoby to pchnięcie świata astronomii do przodu o dobre kilka lat.
Podsumowując, obawiam się, że do małych, mobilnych montaży będzie to zbyt duże i drogie, ewentualnie do średnich miałoby sens. Bo już duże stacjonarne montaże ustawia się raz na zawsze i tu również nie ma sensu się w to bawić.
3 godziny temu, RMK napisał:Jeśli zdecydujesz się na opracowywanie sterownika do montażu możesz pomyśleć także nad GoTo a docelowo zrobisz całkowicie zautomatyzowany montaż do krótkich ogniskowych ?
Kolejnym etapem będzie integracja mojego napędu z EQMod i GOTO z komputera. Coś jak AstroEQ, ale z możliwością również autonomicznej pracy (tracking i ręczne kręcenie bez PC). Autonomiczne goto to już odległa przyszłość i nie wiem, czy znajdę tyle czasu, aby to opracować (i nie wiem, czy to będzie miało sens).
-
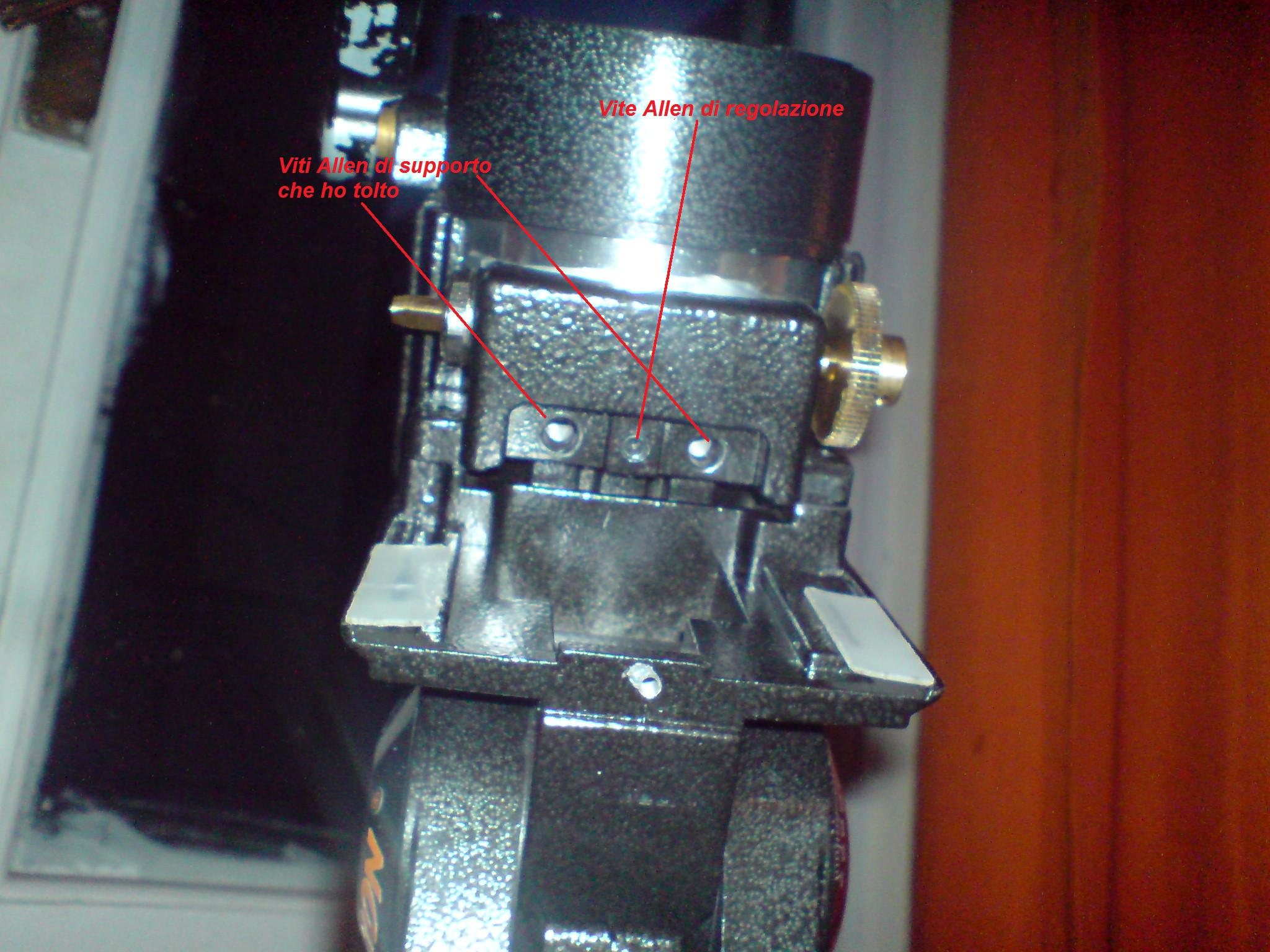
Wygląda na bardzo duży luz na ślimaku. Poluzuj 4 duże imbusy:
2 tutaj:

i dwa tu po bokach:

Następnie wykręć ciut środkowy imbus z tych trzech i dokręć tamte cztery.
Ten środkowy to imbus kontrujący, dwa obok to dociskowe. A te dwa z dołu trzymają całość dodatkowo.
-
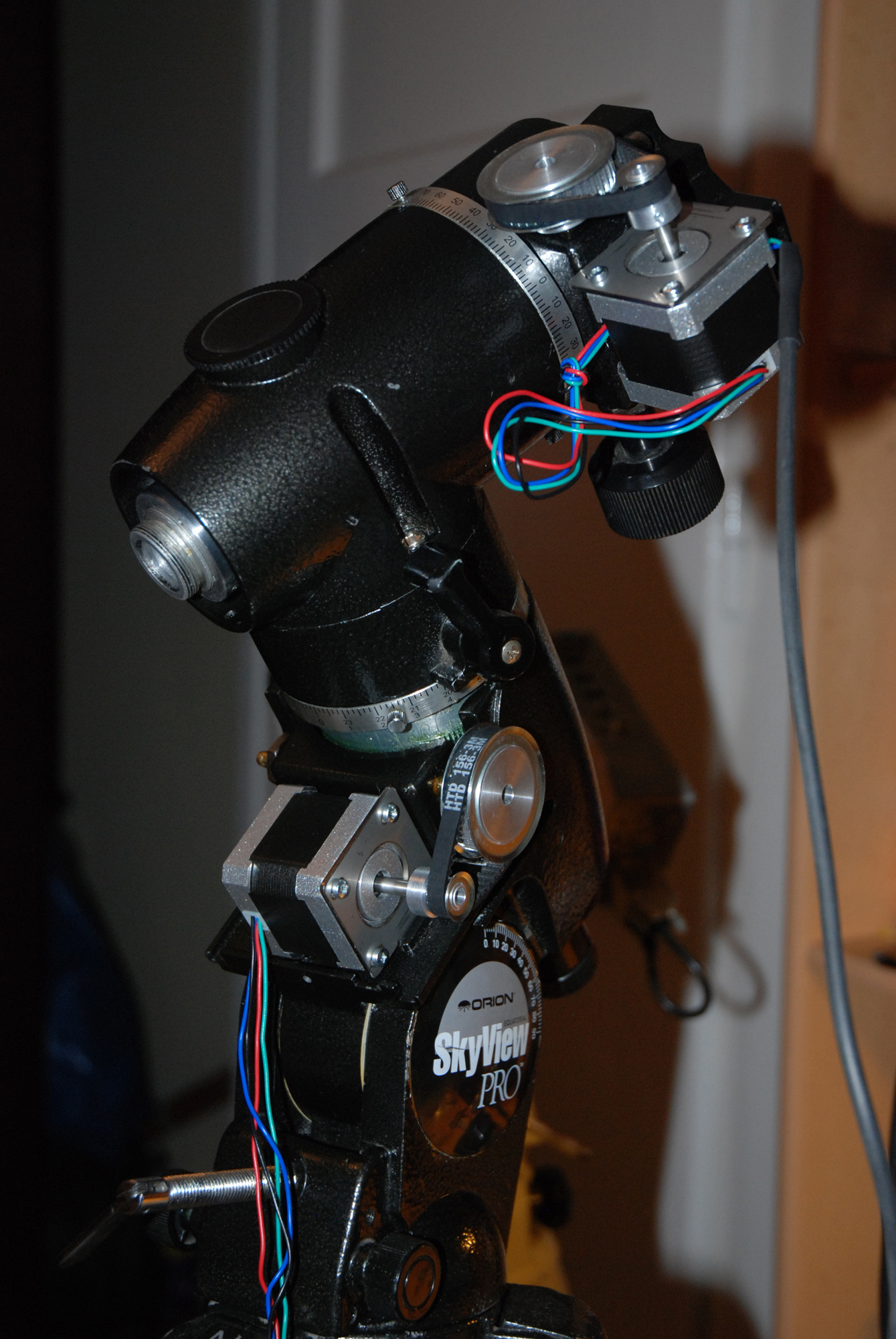
Hmm, a gdyby tak... podłączyć do DreamFocusera dwa silniki? Czy powstanie z tego... tak tak - napęd do montażu
Oto prototyp prototypu napędu dwuosiowego EQ5 na bazie DreamFocusera:
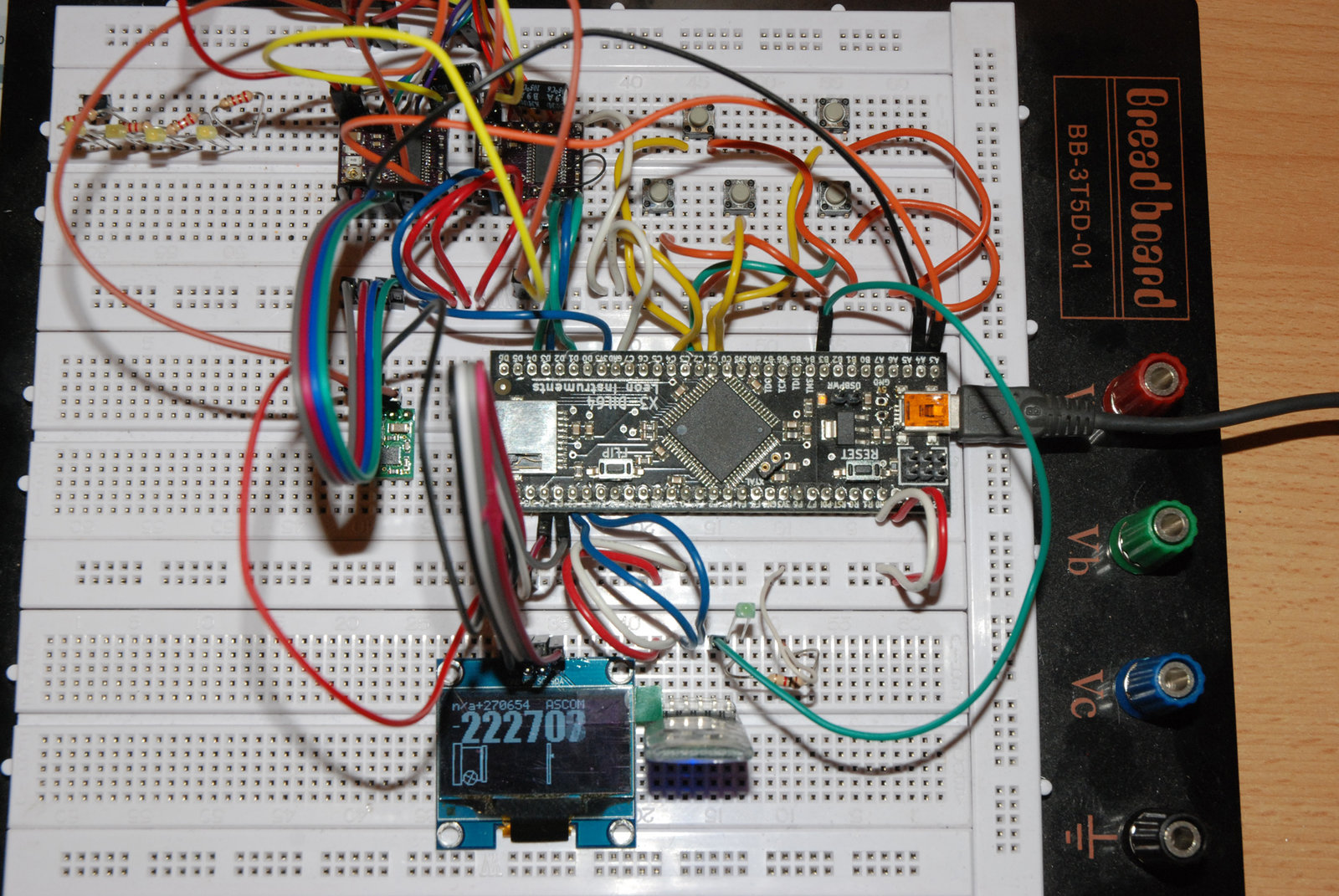
W tej chwili działa prędkość gwiazdowa, ręczne przesuwanie przyciskami i pulseguide. Czekam na skrawek pogody do testów astrofoto.
Czy to się sprawdzi, oraz czy pociągnę projekt dalej - nie mam pojęcia. Na pewno będę dążył do ucywilizowania tego, co widać, aby dało się użyć do guidingu i prowadzenia dokładniejszego, niż klasycznym dwuosiowym napędem od EQ5.
Dzięki temu prototypowi znalazłem dwa, ekstremalnie zakamuflowane błędy tyczące się sterowania ruchem silnika w DreamFocuserze. Wiedziałem, że jakieś błędy tam są, ale nie byłem w stanie ich wykryć. Spojrzenie na sprawę z innej strony dało nieoczekiwane olśnienie
Tak więc niebawem będzie aktualizacja poprawiająca te bugi.
Równolegle pracuję nad obiecaną kompensacją temperatury.
-
7
-
 1
1
-
-
Dnia 10.07.2017 o 08:51, serwa napisał:
Zdradź chociaż odrobinę czego mają dotyczyć?
Hmm, jakby to napisać, żeby się nie zdradzić... nie wiem
Więc na razie trzymam w napięciu.
-
57 minut temu, bajastro napisał:
Mateusz, a czy będzie aktualizacja do istniejących już focuserów z funkcją korekcji temperatury?
Jak najbardziej. Podstawowym założeniem jest możliwość aktualizacji wszystkich istniejących już urządzeń.
-
Dnia 7.07.2017 o 21:55, AMR napisał:
pisałem między krokami testu
tak, chodziło mi o blokowanie się przycisków - w zasadzie to jednego, ale dosyć upierdliwie ...
Być może przycisk jest wadliwy. Mogę Ci go wymienić albo wysłać do samodzielnej wymiany. Nie ma problemu.
Otwory na przyciski są raczej centrycznie, trochę się z tym nagimnastykowałem początkowo. Choć też możliwe, że się jeden krzywo wlutował. Tak czy owak chętnie to poprawię. Tylko za 1,5 tygodnia, jak wrócę z wyjazdu.
-
@AdamK, tak, niestety jeszcze nie zrobiłem tej funkcji. Nie chcę się usprawiedliwiać, przez tyle czasu ile minęło na pewno powinienem był znaleźć chwilę na to. Choć nie jest to niestety taka trywialna rzecz, stąd nie bardzo miałem siłę się za to brać. Cóż - potraktuję to priorytetowo. Teraz nie mam mnie przez 1,5 tyg, ale jak wrócę, obiecuję brać się od razu za robotę.
-
1
-
-
Daniel - jesteś wielki! Ja wręcz ubóstwiałem Twojego bloga, dla tak genialnych żartów nie ma konkurencji
Nie ma nic lepszego niż usiąść sobie wieczorem z kolegą i "cisnąć bekę" z tekstów dnia
Strasznie żałowałem, że przerwałeś jego prowadzenie. Co jakiś czas wracałem na stronę i zaliczałem ponowne napady głupawki
Ale ile razy można się śmiać z tego samego...
Teraz to genialne miejsce powraca! Chwała Ci za to i oby zapał nie zgasł już nigdy.
Nie pamiętam, czy w końcu mówiłem Ci o mojej tęsknicie za blogiem podczas zlotu, ale miałem taki zamiar
Zostać uhonorowanym "tekstem dnia" to prawdziwy zaszczyt (większy, jak apod?
). W nowym sezonie widzę już dwa swoje wpisy, dobrze się zaczyna...
Dnia 2.07.2017 o 16:54, Paether napisał:Wczesną jesienią 2015 zostałem adminem na AP.
Poważnie to tylko dwa lata? Ale ten czas nie leci...
-
1
-

Sterowanie teleskopem z domu - jak?
w ATM, DIY, Arduino
Opublikowano
Hmm, coś nie jestem przekonany, że te zwiechy to tylko sprawa priorytetu. To się zachowuje, jakby komputer czekał, aż klatka się prześle i zawieszał do tego czasu inną działalność, a nie tylko poświęcał więcej procka na zdalny pulpit. Przy rozłączeniu sieci chyba to całkiem staje, a jest to niedopuszczalne. Da się to tak zmienić, żeby pulpit zdalny był zupełnie przeźroczysty? Bo przecież istotą takiego sterowania jest, że to na zdalnym kompie ma wszystko sobie bezawaryjnie działać, bez żadnego wpływu z zewnętrznych czynników, a pulpit zdalny to tylko dodatkowa rzecz, która umożliwia podglądnięcie, co się dzieje. Założenie jest takie, że wifi i laptop w naszych rękach może trafić pocisk balistyczny lub przejechać czołg, a zdalnego (pod teleskopem) komputera ma to wcale nie interesować - on ma być niezawodny, ma sterować teleskopem i olewać cały świat")