MateuszW
-
Postów
9 955 -
Dołączył
-
Ostatnia wizyta
-
Wygrane w rankingu
41
Typ zawartości
Profile
Forum
Blogi
Wydarzenia
Galeria
Pliki
Sklep
Articles
Market
Community Map
Treść opublikowana przez MateuszW
-
A nie dało by się zrobić takiej pochodni, która by się paliła w próżni? Np by wydmuchiwała jakiś palny gaz (np metan) oraz tlen. Jak by się to zachowywało w próżni?
-

Regulacja docisku ślimaka do ślimacznicy - HEQ5
MateuszW odpowiedział(a) na .zombi. temat w Dyskusje o sprzęcie
Niestety HEQ5 ma zauważalnie mimośrodowe ślimaki i ślimacznice wskutek czego nie da się dokładnie wykasować luzu. Radzę sprawdzić, jak montaż się zachowuje w każdej pozycji (360st), bo może się okazać że w jakiejś będzie problem. Ta było u mnie - doregulowałem ładnie luzy i w okolicach miejsca, gdzie regulowałem było OK, ale już na deklinacji M33 którą akurat fociłem okazało się, że dość mocno jest ściśnięte i w deklinacji miałem straszne piki. Ciężko opisać, jaki opór jest akceptowalny, ale powiem tylko, że niewielki tzn można swobodnie kręcić jednym palcem ślimak za dużą zębatkę. Możesz zrobić test z silnikiem na minimalnej prędkości, czy nie słychać przy ruszaniu i stawaniu takiego "tyk", bo to oznacza za duży docisk i skutkuje minimalnym szarpaniem przy ruszaniu, co widać na wykresie guide jaki piki 6-8" (w deklinacji, bo tam silnik staje i zmienia kierunek). Mi wygodnie było kręcić na próbę ślimakami za tej dużej zębatki, ty to robisz w jaki sposób? Silnik miałem tylko odsunięty, abym mógł go szybko zasprzęglić i przejeżdżałem silnikiem co jakieś 20st i sprawdzałem luzy w każdej z takich pozycji (ręcznie można sie zarobić na śmierć z tym kręceniem ). To ciekawe, że już lekki opór im wystarczał, żeby gubiły kroki. Ja po wspomnianym felernym wyregulowaniu deklinacji też miałem wyraźny opór w niektórych pozycjach, ale silnik nie przeskakiwał. To może zależeć od tego, co definiujesz przez "lekko wyczuwalny opór" -
Rozmiary kątowe - jak je obliczyć
MateuszW odpowiedział(a) na Adrian Kumor temat w Astrofizyka, kosmologia i teorie
Nic prostszego 1o = 60' , 1' = 60" (oczywiście '-minuta, "-sekunda kątowa). Czyli aby ze stopni mieć minuty, musisz pomnożyć przez 60, a ze stopni sekundy, to mnożysz przez 3600. -
Firmware pobierasz ze strony SW, dokladnie stąd: http://skywatcher.com/downloads/SYSCAN%20FIRMWARE%20V3.35.zip (link u Aliena jest nieaktualny)
-
Jest bardzo tania przejściówka Digitus oparta na ftdi. Uzywam takich dwóch i są niezawodne. http://www.digitus.info/pl/produkty/akcesoria/adaptery-i-konwertery/adapter-usb-interfejs-szeregowy-usb-20-da-70156/
-
Tyle mi pokazał pinpoint dla 2 fotek M33 z różnych nocy. Może akurat mi się udało. Choć wydaje mi się, że EQMod może umożliwiać dokładniejsze celowanie od SynScana (protokół komunikacji na to pozwala). Robiłem ze 2 plateslowy i ze 4 razy użyłem "point telescope here" i trafił tak dokładnie. Widać było, że przy każdym pointowaniu miał coraz to inny błąd (mniejszy od minuty), aż w końcu trafił w prawie w punkt.
-
Piszę oczywiście o rotacji, a nie o położeniu. No rzeczywiście trochę z tym przesadziłem, właśnie sprawdziłem i ja też miałem ostatnio błąd na poziomie 1st. A błąd ustawienia położenia to na moim HEQ5 kilka - kilkanaście sekund
-
NEQ6 jakie łożyska dla osi slimaków?
MateuszW odpowiedział(a) na Jarek76 temat w Dyskusje o sprzęcie
Opis się teraz zgadza do małych strzałek, ale duże nadal są na odwrót. Chociaż jeśli założymy, że duże strzałki są przyłożone do ślimaka, a nie ślimacznicy, to będzie OK -
Orientacja detektora w wyciągu nie wpływa na orientację spajków względem fotografowanego obiektu, a z tego co zrozumiałem, to o to było pytanie Czyli nieważne jak wsadzisz aparat, to zawsze po obróceniu fotki na kompie spajki się zgrają. Na orientację spajków wpływa tylko obrót tuby w obejmach (czyli w osi optycznej). Oczywiście ważne jest zachowanie podobnej orientacji aparatu między sesjami, ale ze względu na to, żeby nie stracić niepokrywających się miejsc, a nie ze względu na spajki. Ręcznie nie uda Ci się ustawić idealnie tak samo kadru między sesjami ale błąd będzie niewielki i nie stracisz na tym znacznie (myślę że jakieś 5-10st błędu będzie).
- 23 odpowiedzi
-
- 2
-

-
- Canon 40D mod
- Orion
- (i 8 więcej)
-
Cykliczny plebiscyt astrofotograficzny - "Obiekty głębokiego nieba"
MateuszW odpowiedział(a) na Pav1007 temat w Plebiscyty i konkursy
A co jeśli w wątku ktoś prezentuje kilka fotek różnych obiektów? Albo w różnej palecie? Będą wtedy wszystkie startowały? Poradziliście sobie z ograniczeniami ankiety, że będą teraz wszystkie fotki? -
NEQ6 jakie łożyska dla osi slimaków?
MateuszW odpowiedział(a) na Jarek76 temat w Dyskusje o sprzęcie
A czy te obrazki nie są dokładnie na odwrót? Jak regulowałem luzy, to wydaje mi się, że zachowanie było właśnie odwrotne, czyli dokręcanie śrubki od strony ślimaka powodowało zmniejszenie oporu (odsunięcie). Zresztą jak się zastanowić logicznie nad rysunkiem, to widać że jest na odwrót. Strzałki powinny być w te same strony (mała i duża), bo przecież dokręcenie lewej śruby powoduje przesuwanie tego żółtego elementu, czarnego dołu i ślimacznicy na prawo. Mogę się mylić, ale tak się wydaje logicznie. -
Garść ATMu, czyli motofocuser i nie tylko
MateuszW odpowiedział(a) na MateuszW temat w ATM, DIY, Arduino
Mam jeszcze jedno pytanie. Czy warto bawić się w takie ładne stopniowe rozpędzanie silnika na dużych prędkościach? Coś jak ma miejsce w HEQ5. Będzie z tym trochę roboty, a nie wiem czy to cokolwiek wniesie przydatnego. Na pewno by to wyglądało ładnie. Raczej bym to wykorzystywał tylko przy ustawianiu pozycji z pamięci/komputera, bo ręcznie lepiej nie mieć takich "opóźnień". -
Garść ATMu, czyli motofocuser i nie tylko
MateuszW odpowiedział(a) na MateuszW temat w ATM, DIY, Arduino
A, to o tym wiem, wcześniej Cię nie zrozumiałem Trochę ten efekt łagodzi funkcjonalność układów sterujących, które przy włączaniu uzwojenia na krótką chwilę dają prąd ciut wyższy od znamionowego, przez co uzwojenie się szybciej "ładuje". Właśnie obnażyłeś moją głupotę i totalną ignorancję sterowania mikrokrokowego O, widzę, że sam to zauważyłeś No właśnie, a do tej pory myślałem, że to jest tak ładnie liniowo Muszę to czym prędzej poprawić. Chciałbym zachować większą ilość mikrokroków z uwagi na redukcję drgań. Trochę nie rozumiem tego drugiego sposobu sterowania, mógłbyś opisać szerzej? Zabiera mi tyle w skrajnym przypadku, czyli przy minimalnej prędkości. Przy maksymalnej ten delay wynosi 0, a prędkość ogranicza reszta kodu. W zasadzie poza sterowaniem silnikiem procesor w tym samym czasie nie robi za dużo. Co kilka sekund sprawdza czujnik temperatury i ewentualnie odpowiada na RSa, że jest zajęty. Te czynności wywołuję właśnie w przerwaniu, czyli jakby w drugą stronę . Tak myślałem zrobić, żeby odciążyć procesor, ale jeszcze tego nie zrobiłem. Będzie trochę babraniny, żeby się nie pogubić w krokach, czego strasznie nie lubię (tej babraniny). A czy poza odciążeniem procesora wpływa to na inne rzeczy? Nie wydaje mi się, żeby to wpływało na np. moment obrotowy, bo przecież sumaryczny prąd w uzwojeniach wynosi od 100% do 200% cały czas, czyli to samo, co w półkroku. -
Garść ATMu, czyli motofocuser i nie tylko
MateuszW odpowiedział(a) na MateuszW temat w ATM, DIY, Arduino
O, fajny układ. Jak coś to czekam na opis Sprzętowe mikrokroki są bardzo wygodne. Szkoda, że cena jest 10x większa od moich układów (nic dziwnego), ale jeszcze nie taka duża. -
To może być to, choć skąd wiemy, że cień akurat szedł po tarczy przy księżycu, a nie że nie było go zupełnie wtedy?
-
Garść ATMu, czyli motofocuser i nie tylko
MateuszW odpowiedział(a) na MateuszW temat w ATM, DIY, Arduino
Nie poniosła mnie, to jest prawda O ograniczeniach sprzętowych prędkości wiem dobrze i przy poprzednim sterowaniu 6 mikrokrokowym właśnie taki był limit - sprzętowe możliwości silnika. Ciekawe, jest to co piszesz o ograniczeniach indukcyjności, bo do tej pory myślałem, że jedyny problem to spadek momentu tak, że silnik już nie może się ruszyć. Czyli mam rozumieć, że zanim moment spadnie do prawie zera, to już skończy się ten limit indukcyjności? W indukcyjności i magnetyzmie niestety słabo się orientuję. Przy ruszaniu silnikiem z maksymalną prędkością odpalam kod zmiany kroku bez żadnej przerwy. Ten kod ogranicza mi prędkość. On nie jest niestety taki prosty. Wcześniej (krok 1/6) robiłem to tak, że przepisywałem wprost wartości z tablicy, gdzie miałem wpisane ustawienia protów na każdy mikrokrok. Teraz nie mogę tak zrobić, bo bym musiał mieć zdefiniowane 256 stanów (po 4 chary na każdy), co by dało już 1KB pamięci (cały ram zajęty). Dlatego przy każdym kroku liczę sobie wartości potrzebnych rejestrów i je ustawiam. Podejrzewam, że skomplikowałem masakrycznie ten kod i mógłby być dużo prostszy. Wrzucam ten fragment poniżej, może będzie Ci się chciało go zrozumieć i poradzić mi jak go przyśpieszyć . Funkcję KrokSilnika odpalam, aby przesunąć silnik o jeden mikrokrok. Parametr kierunek wynosi 0 lub 1. Nie do końca rozumiem, jak programowanie w czasie rzeczywistym może mi podnieść wydajność. Jak procesor może przyśpieszyć, jeżeli już wykorzystuje całą moc? char kroki[8]={0b100111,0b110100,0b011100,0b000110,0b000011,0b010000,0b111000,0b100010}; uint16_t polozenie=0; int i=0; int nap=0; int mikro=32; void KrokSilnika(long double pr, char kierunek) { if(nap==mikro || nap==0) { char chce_do_gory=(((kroki[i]&0b11000)>>3) == 0b11) || ((kroki[i]&0b11) == 0b11); if(nap==0) { if(!chce_do_gory && !kierunek) i++; else if(chce_do_gory && kierunek) i--; } else { if(chce_do_gory && !kierunek) i++; else if(!chce_do_gory && kierunek) i--; } if(i>7)i=0; if(i<0)i=7; output(silnik_kierunekA,kroki[i]>>5); output(silnik_kierunekB,(kroki[i]&0b100)>>2); } char narastanie; if((kroki[i]&0b10000)>>4)narastanie=(kroki[i]&0b1000)>>3; else narastanie=kroki[i]&0b1; if((narastanie && !kierunek) || (!narastanie && kierunek))nap++; else nap--; if(kierunek)polozenie++; else polozenie--; if((kroki[i]&0b10000)>>4) { OCR1A=nap*255/mikro; OCR1B=255; } else { OCR1A=255; OCR1B=nap*255/mikro; } _delay_us(2500/pr-50); } -
Garść ATMu, czyli motofocuser i nie tylko
MateuszW odpowiedział(a) na MateuszW temat w ATM, DIY, Arduino
Dzięki. Jakoś tak ładnie wyszło Kwestia zasilania może być dla niektórych pewnym problemem, na szczęście ja zawsze mam zasilanie z sieci, bo i tak by tego wszystkiego żaden sensowny akumulator nie pociągnął i dlatego o sprawę zasilania nie dbam. Jest jeszcze jedna istotna rzecz - gdybym maił umieścić taki napęd w obserwatorium, przy teleskopie z innym wyciągiem (takim, który nie ślizga się na końcach zakresu, jak Crayford), to przy wyłączeniu zasilania traciłbym aktualne położenie i nie mógłbym go łatwo, zdalnie wyzerować. Choć rozwiązanie jest takie, żeby silnik się "parkował" przed wyłączeniem zasilania, czyli wskakiwał na najbliższy pełny krok. U mnie te problemy nie występują zupełnie, bo po włączeniu zeruję napęd, czyli silnik przejeżdża dystans większy od zakresu pracy i wykorzystuje to, że Crayford się ślizga na końcach zakresów, a więc po takim przejeździe jest idealnie na początku zakresu. Dzięki za link, trochę się z tym namęczyłem, ale chyba rozumiem Już myślałem, że coś się nie zgadza, bo przecież silnik na mikrokrokach nie stracił na ogólnej mocy (czyli dalej podnosi podobne obciążenie), a tu przecież chodzi o moment trzymania zadanego mikrokroku. W takim razie chyba z powrotem ustawię moc na 100%, bo to zawsze 2x lepsze trzymanie. Zmniejszyłem to, żeby się silnik nie grzał, ale i tak mu nic nie powinno być. Czytałem już kilka artykułów o mikrokrokach, ale nie natknąłem się jeszcze na takie informacje, a to przecież ważne i logiczne. Oczywiście zdaję sobie sprawę z tego, że silnik jest niedokładny, ale to mi niczego nie psuje. Zauważ, że nie potrzebuję takiej dużej, jak teoretyczna dokładności. Już przy czterech mikrokrokach dokładność silnika jest ponad 3,5x lepsza, niż CFZ ! Jeśli natomiast wezmę przypadek skrajnego teleskopu (f/3), to CFZ zmniejsza się do 21 um (dla najgorszej fali niebieskiej), a więc używając zaledwie ośmiu mikrokroków uzyskuję dokładność 2,5x większą. Czego tu chcieć więcej? Sam piszesz, że sensowna dokładność silnika krokowego to 1/8 kroku, czyli wszystko będzie OK. Silnik z mikrokrokiem 1/8 będzie trzymał pozycję z momentem 20%, czyli przy odpowiednio mocnym silniku (jak u mnie) będzie to wystarczające. U mnie większa ilość mikrokroków jest głównie dlatego, żeby silnik nie powodował drgań przy obracaniu i nie "tykał". Tak więc nie zgadzam się, że napęd bezpośredni to tylko do wizuala i mam nadzieję, że to rzeczowo wyjaśniłem Jaka jest przewaga napędu bezpośredniego nad przekładnią? - Nieporównywalnie większa prędkość (jak czytałem o tych minutach potrzebnych na pełne przejechanie zakresu robofocusem, to mi się słabo robiło ), która przy astrofoto ma co prawda nieduże znaczenie, ale już dla wizuala jest istotna. - brak backlasha, co z kolei ma niebagatelne znaczenie w precyzyjnym autofocusowaniu. Żadne kompensowanie backlasha nie da takiego efektu, jak jego brak. Dodam jeszcze, że pierwotnie planowałem użycie silnika 400 krokowego - to prawdziwy rarytas, ceny takich cacek w sklepie są bardzo duże. Niestety okazał się za słaby do tego celu. A skąd miałem taki silnik? Z archaicznego dysku twardego. Byłem zaskoczony, że kiedyś takie dyski były. Silnik służył do ruszania głowicą. Podejrzewam, że jego dokładność jest bardzo duża, bo on nie miał żadnej przekładni mechanicznej, tylko bezpośrednio kręcił głowicą. A to przecież dysk twardy, tam precyzja jest ogromna. A właściwie, to te układy do sterowania silnikiem podpatrzyłem właśnie z tego dysku.- 16 odpowiedzi
-
- 1
-
-
- ATM
- motofocuser
- (i 1 więcej)
-
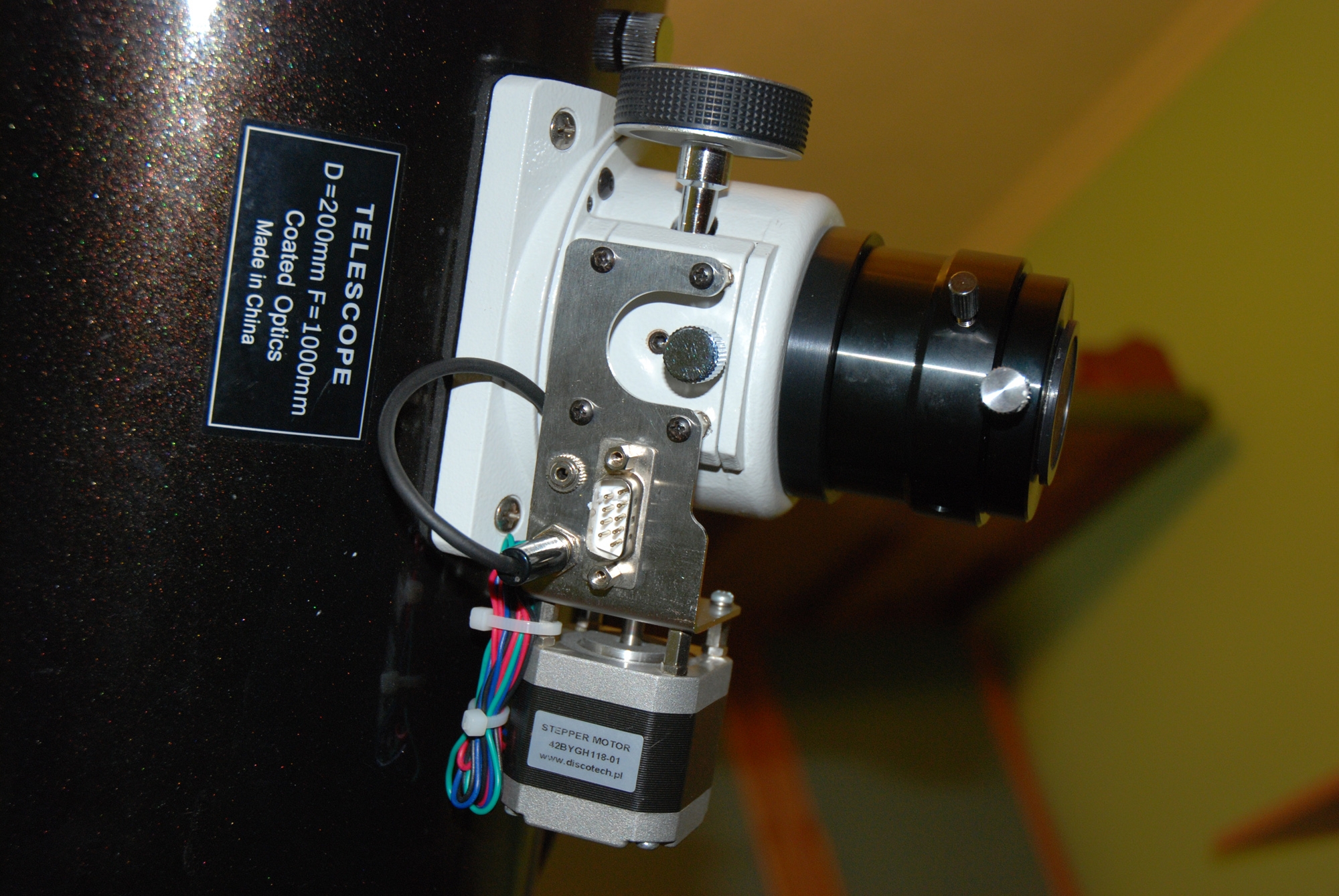
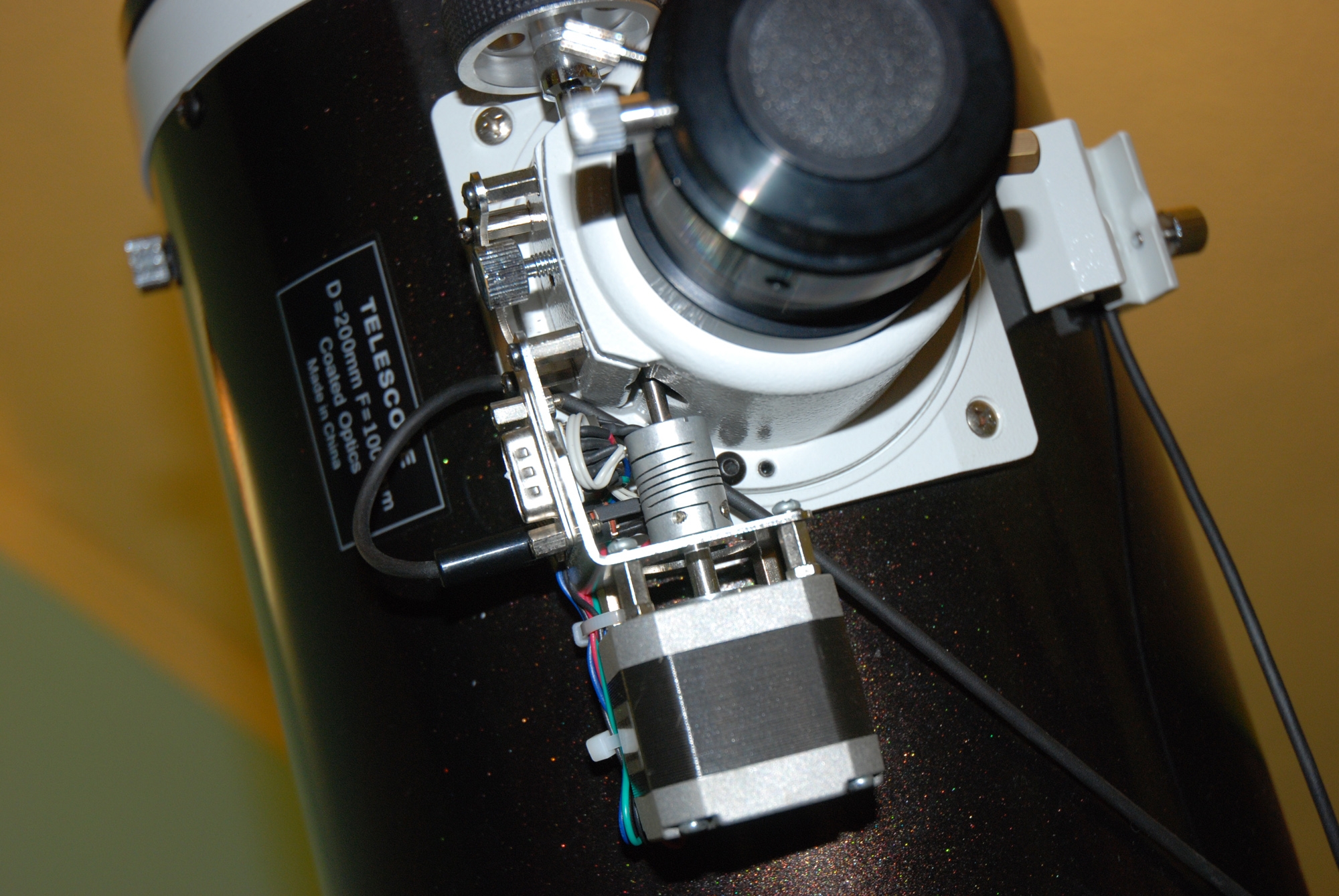
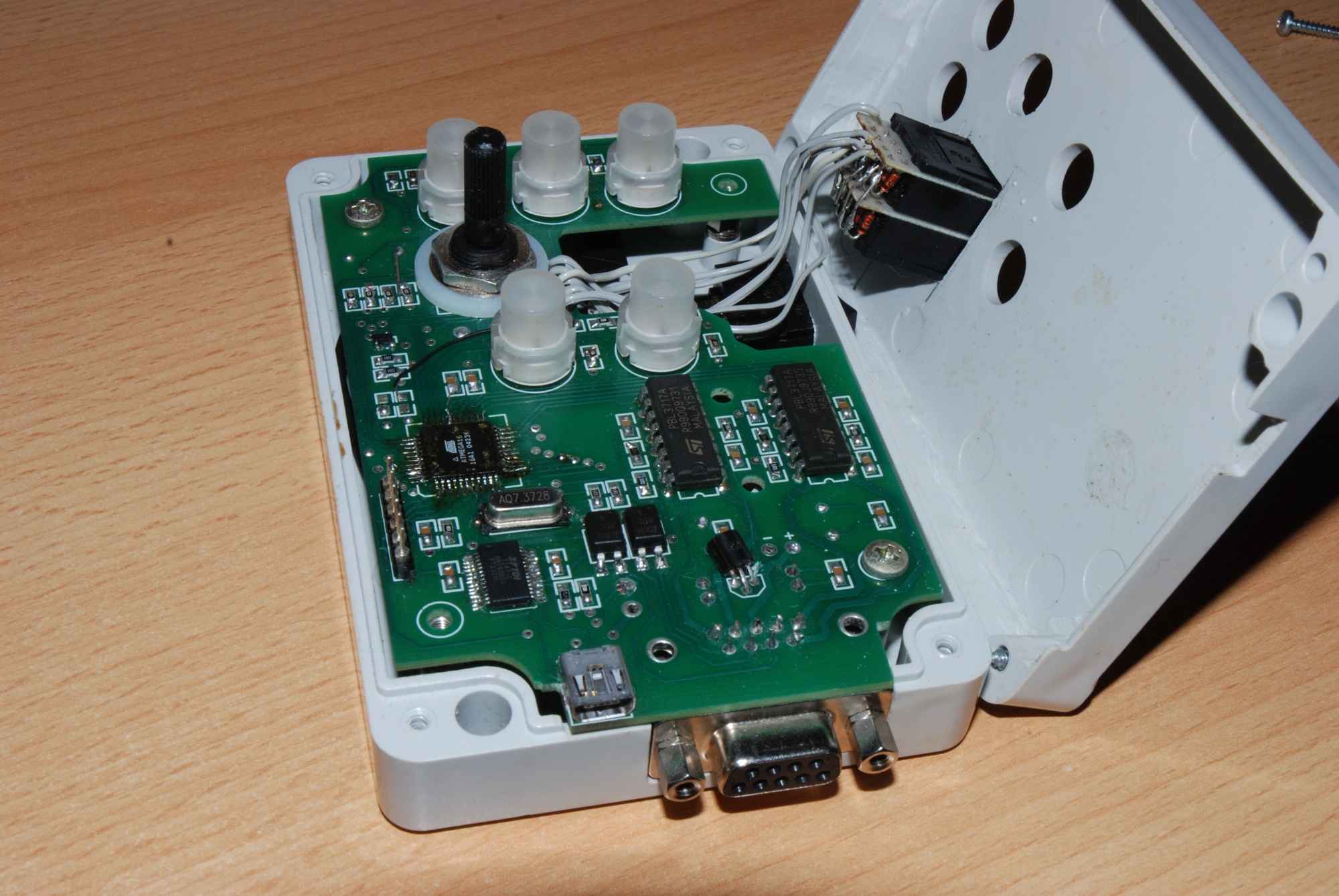
Po dość długim czasie wreszcie zebrałem się na opisanie modyfikacji, jakich dokonałem przy moim teleskopie. Tak więc po kolei: 1)Motofocuser: - Opiera się na silniku krokowym bipolarnym o 200 krokach na obrót i momencie trzymającym 42 Ncm. Dokładnie taki: http://www.silniki.pl/index.php?site=products&type=250&details=1076. - Jest zamocowany "na wprost" do osi wyciągu Crayforda SW, bez żadnego microfocurera (czyli przekładnia 1:1). - Silnik ma na prawdę potężny moment, dlatego postanowiłem ograniczyć jego moc o połowę. Po tym zabiegu dalej bez najmniejszych problemów podnosi ciężkie okulary (Nagler 26 mm) i jeszcze cięższy sprzęt foto (na razie 1 kg, ale testowałem więcej). - Sterowany jest w trybie 64 mikrokroki na krok, co daje 12800 kroków na obrót, a na pełny zakres wyciągu (3 obroty) 38400 kroków. Zakres pracy wyciągu to 38,55 mm, a więc mam rozdzielczość 0,001 mm (1 um). CFW (critical focus zone) wynosi u mnie 62 um, a więc mam 62x lepszą dokładność Dlaczego zdecydowałem się na tyle mikrokroków? Wcześniej miałem 6, ale zapragnąłem super dokładności a co ważniejsze przy 6-ciu mikrokrokach silnik wprowadzał odczuwalne (szczególnie na dużych powerach) drgania, które utrudniały ostrzenie. Na 64 mikrokrokach wszystko jest idealnie, ruch jest płynny, praktycznie ciągły (nie do rozróżnienia "słuchowo" są pojedyncze kroki nawet na minimalnej prędkości, nie słychać "tykania"). Jako bonus otrzymałem całkiem przyjemną melodyjkę, czyli piszczenie silnika, takie jak z napędów HEQ5 (oni też używają 64 mikrokroków). - Sterownik bazuje na mokrokontrolerze ATmega16, taktowany jakimiś 7.coś megahercami. - Silniki obsługują 2 (po jednym na uzwojenie) układy PBL3717A http://www.ret.hu/DataSheets/38_ANALOG_IC/STM_009/CD00000116.pdf. Mogą dać maksymalnie 1A prądu na uzwojenie (mój silnik ma 0,5A). Steruje je się prosto - jeden bit ustala kierunek, a dwa moc na silniku (0%,25%,50%,100%). Dzięki temu można tymi układami sterować z użyciem 6-ciu mikrokroków, co wcześniej wykorzystywałem. Teraz mikrokroki są realizowane za pomocą dwóch PWMów sprzętowych w ATmedze, a funkcjonalność układów została użyta do ograniczenia mocy do 50% (działają impulsowo). - Sterownik posiada 2 przyciski do sterowania ręcznego, potencjometr do regulacji prędkości, 3 przyciski oraz 2-cyfrowy nastawnik BCD do zapisywania i odczytywania do 99 pozycji. Pozycje zapisywane są w nieulotnej pamięci EEPROM. Przyciski są podświetlane . - Sterownik można oczywiście sterować z komputera, co jest realizowane układem FT232R, który zamienia RS232 z ATmegi na USB. Napisałem własny "protokół" komunikacji z nim, który wykorzystuję do sterowania w swojej aplikacji (więcej o niej może napiszę później), oraz zaprogramowałem niektóre komendy ROBOFOCUSA. Dzięki temu motofocuser jest rozpoznawany przez oprogramowanie robofocusa i jego sterownik ASCOM, a więc mogę go używać z programami takimi jak MaximDL oraz FocusMax. W planach mam napisanie własnego sterownika ASCOM (jak to uczynił jolo liczę na pomoc ), ale oczywiście nie ma na to czasu. - Z sterownika wychodzą jedynie 2 kable - mini USB oraz DB9 (komunikacja z silnikiem, zasilanie i inne). - Jest również cyfrowy czujnik temperatury (DS18B20 http://datasheets.maximintegrated.com/en/ds/DS18B20.pdf) o rozdzielczości 0.0625°C. Na razie jedynie można odczytać temperaturę moim programem i nie ma jeszcze kompensacji, ale jest w planach. Czujnik na razie mieści się w obudowie, co trochę fałszuje jego odczyty, nad tym muszę jeszcze pomyśleć. - Silnik działa szybko - jakieś 4-5s na cały zakres pracy. Oczywiście można ustawić również prędkość ledwo zauważalną. To jest główna zaleta nad napędami z przekładnią (np. robofocus), bo one takiej prędkości nie są w stanie uzyskać. Prędkość silnika ogranicza w tej chwili prędkość procesora Przetwarzanie 64 mikrokroków tak szybko wymaga już pewnej mocy obliczeniowej, bo to wbrew pozorom nie jest takie banalne - Sterownik jest w pewnym sensie wielozadaniowy. Potrafi odczytywać temperaturę o wysyłać ją do komputera w trakcie kręcenia silnikiem i wysyłać również inne dane. Gdy pojawia się komenda tycząca się ruchu, gdy silnik już coś robi, to sterownik grzecznie odpowiada, że jest zajęty Tu jest jeszcze trochę rzeczy do dopracowania. - Jest jeszcze bonus Sterownik posiada dodatkowo możliwość sterowania migawką aparatu, jako wężyk spustowy. Ma do tego 2 transoptory. Z tej funkcjonalności można korzystać za pomocą mojego programu. W planach jest do tego kolejny sterownik ASCOM Od pewnego czasu tej funkcji nie używam, bo przesiadłem się na kamerę - Przy silniku są 3 złącza - DB9 do komunikacji ze sterownikiem, DC do wyprowadzenia zasilania (w celu zasilania sterownika grzałek, o którym później)(oszczędzam 1 kabel ), oraz mini jack w celu podłączenia kabla do złącza wężyka w aparacie. - Mocowanie silnika jest cięte z blach nierdzewnej laserowo na zamówienie i gięte na imadle w domu - Motofocuser wykonałem już jakieś 2 tata temu, potem go jeszcze ulepszałem, a do dziś piszę program i końca nie widać Był ze mną już na wielu sesjach i sprawdzał się znakomicie, ani razu mnie nie zawiódł. To na razie tyle Jak mi się jeszcze coś przypomni, to dopiszę. Za niedługo pojawi się również opis kilku innych urządzeń ATM, jakie wykonałem. Zachęcam do komentowania, krytykowania, chwalenia i poddawania pomysłów

- 16 odpowiedzi
-
- 18
-
-
- ATM
- motofocuser
- (i 1 więcej)
-
Mocowanie obiektywu Canona z możliwością sterowania autofocusem?
MateuszW odpowiedział(a) na jcbo temat w Dyskusje o sprzęcie
Dzięki za info. W moim wypadku byłoby ciut lepiej, bo Nikon ma BF 46,5 mm. No ale to i tak daje tylko 17 mm na coś z filtrami, czyli żadne koło tam nie wejdzie A szkoda, bo tą złączkę bym kupił za 30 zł, a tak to jeszcze trzeba by szufladkę mieć do tego za nie wiadomo ile euro. No ale koniec z tym off top -
Mocowanie obiektywu Canona z możliwością sterowania autofocusem?
MateuszW odpowiedział(a) na jcbo temat w Dyskusje o sprzęcie
Czyli w oryginalnym adapterze był gwint M60? Mam rozumieć, że na zdjęciu z lewej jest ta złączka przerobiona przez TS, a z prawej jest oryginalna, nieruszana z tym gwintem M60? Może zamiast klejenia dałoby się te 2 elementy ze sobą zespawać? A jaki zapas backfocusa daje ta złączka z TS? Wejdzie płaskie koło filtrowe? -
Gratulacje! Ciekawy ten obiekt, gdybym podobne zdjęcie znalazł gdzieś indziej, to pomyślałbym pewnie, że to jakaś symulacja Aż niesamowite, że takie dziwne obiekty są w kosmosie.
-
Mocowanie obiektywu Canona z możliwością sterowania autofocusem?
MateuszW odpowiedział(a) na jcbo temat w Dyskusje o sprzęcie
Widzę, że złączka do obiektywu już naprawiona ? Możesz pokazać, jak to teraz wygląda i jak się sprawuje? Trochę masz krzywo ten silnik. Pasek się nie zsuwa? -
Co zmieniłeś, że zaczęło działać?
-
Tak, FlyCapture i FlyCap to dokładnie to samo. Pobrałeś dobrą wersję. Odznaczasz auto oraz on/of przy Exposure, Shutter, Gain i Frame rate. Teraz możesz sobie ustawić ręcznie Shutter (czas exp) i Gain. Wybierz Y800. Ja miałem dokładnie taki błąd, jak robiłem to na Win7 64bit. Na XP było dobrze od razu . Widzę, że masz XP, więc to dziwne.
-
masakra Ja gdybym prowadził ten program, to bym nie wytrzymał ze śmiechu