piotrs
-
Postów
1 085 -
Dołączył
-
Ostatnia wizyta
Typ zawartości
Profile
Forum
Blogi
Wydarzenia
Galeria
Pliki
Sklep
Articles
Market
Community Map
Treść opublikowana przez piotrs
-
-
Tak, taki jest świetlany plan. Tyle że krucho z czasem (to normalne) ale i mój narowisty Soligor zaczął brykać - tym razem w kierunku przekształcania gwiazdek w małe saturniki. Muszę to zwlaczyć (pewnie naprężenia optyki), bo teraz to się tego nie da pokazać. Łozyska - zwłaszcza ślimaka - oczywiście wymienię, ale muszę na nie poczekać.
-
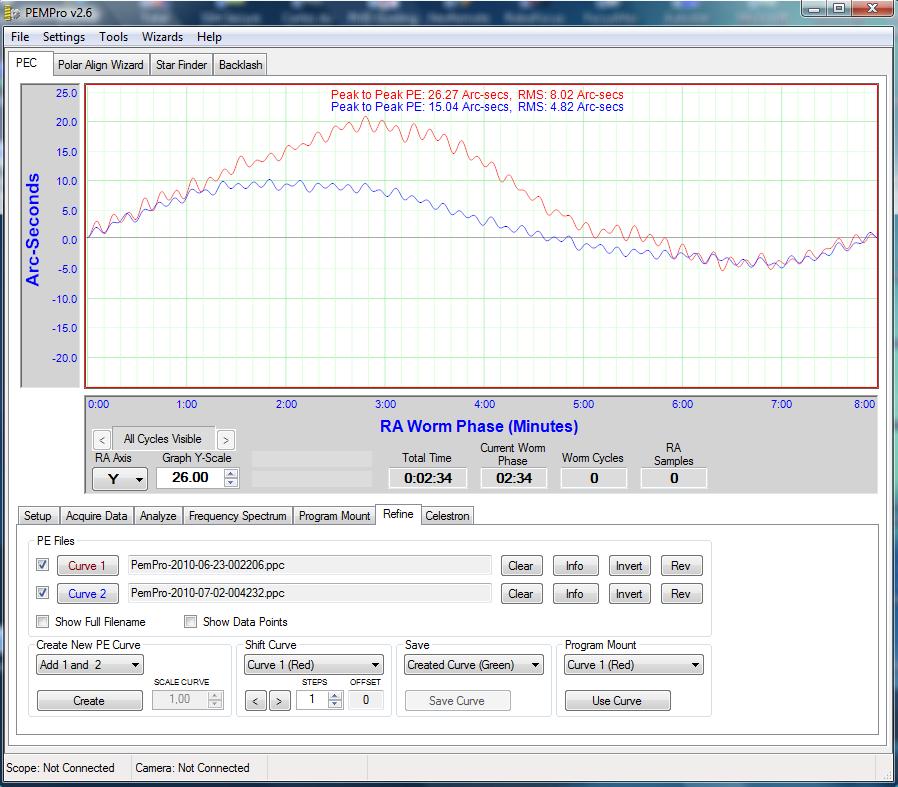
No to teraz uważacie. Wczoraj popychany zwykłą ciekawością zrobiłem sesję 10-ciu odczytów PE za pomocą PECTool. PECTool to firmowy program Celestrona, który m.in. umożliwia automatyczne stworzenie krzywej PEC na podstawie uśrednienia wielu przejść przez 8-minutowe cykle ślimaka, przy prowadzeniu przez guider. Tak wygląda ta krzywa: Wgrałem PECTool-em PEC. Włączyłem PEC i guidera. Wtedy zobaczyłem taki przebieg w PemPro (użytego tym razem nie do tworzenia i upload PEC, tylko do obserwacji przebiegu zdarzeń): Jeśli to jest zjawisko powtarzalne, a nie szczęśliwy zbieg okoliczności, to jestem prawie u celu ... Gdyby to tak działało, to by się znów okazało że najciemniej pod latarnią, czyli już dawno trzeba było wrócić do starego PECTool-a a nie szukać Pacanowa po świecie ...

-
Hans, zobacz może to: http://www.netia.pl/uslugi,dla_domu,112.html Ja tego używam od ponad roku i jest OK. To jest bardzo mało znana usługa, ale działa. Jest tam też mapka zasięgu.
-
OK, teraz i tak muszę poczekać na łożyska, a po tym co zrobiłem jest już lepiej niż miałem dotąd. W szczególności łożyska ślimaka - to te 180-cio sekundowe bujnięcia. 10-cio sekundowe to koła zębate łączące silnik ze ślimakiem. Tu albo coś sie uda na regulacji luzu pomiędzy nimi, albo trzeba je zmienić. Przy okazji pytanie - może ktoś wie: w EQ 6 ile zębów mają te koła i na jakiej średnicy wałkach są osadzone? Pytam, bo może zestawy z PierroAstro będą pasować co CGEM: http://www.pierro-astro.com/Montures.html#5
-
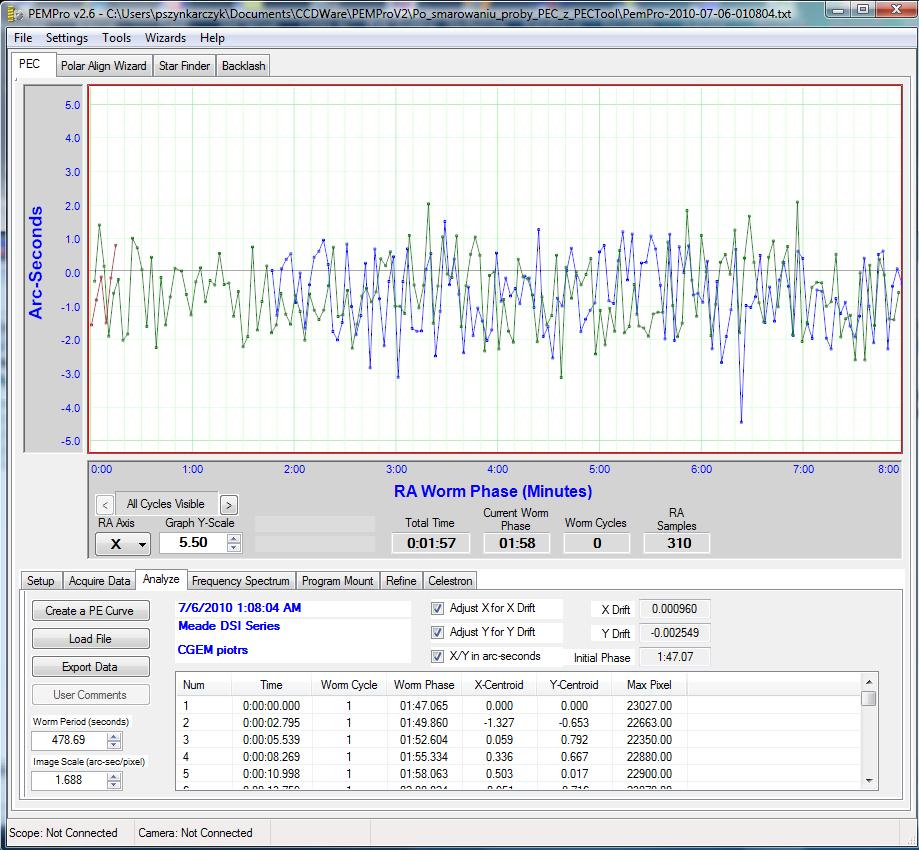
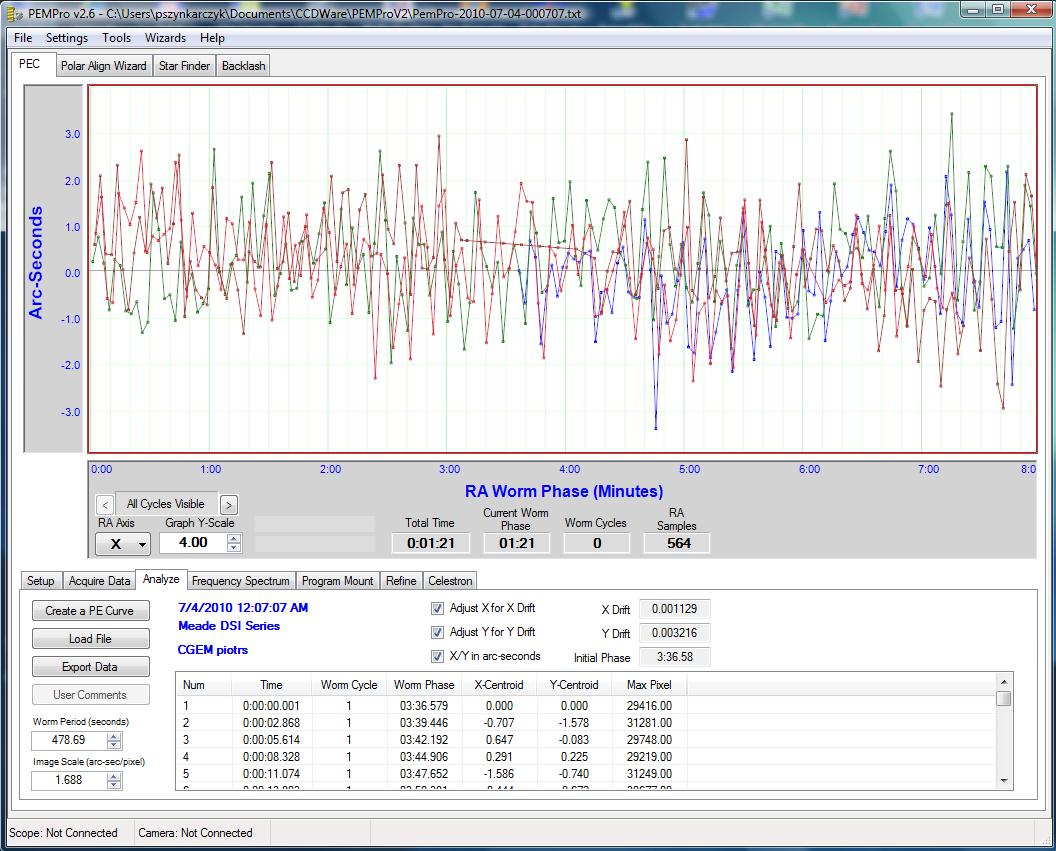
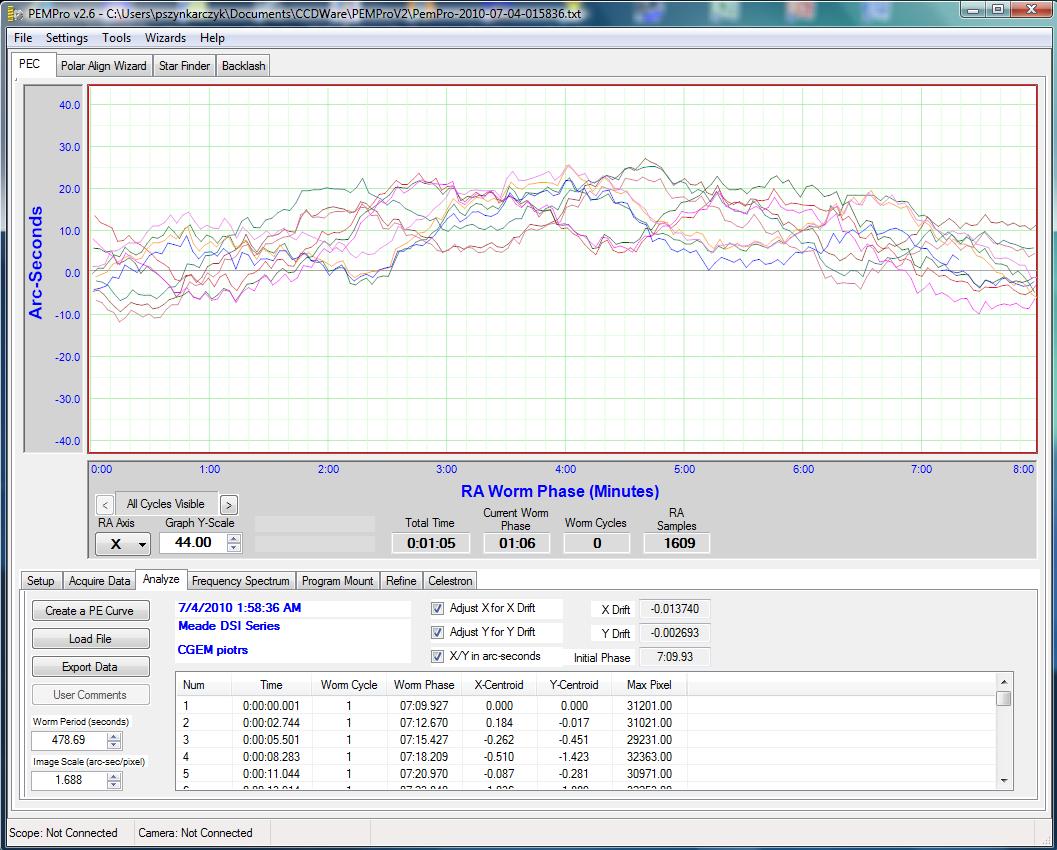
Philips i Hans: dziekuję za przychylne komentarze i za Wasze rady. Będę dalej próbował coś zrobić, także opierając się na Waszych doświadczeniach. Wczoraj znów poniosłem porażkę z PEC. Zanim to opiszę, pokazę jednak i jeden sukces. Oto jak wczoraj wychodził guiding (za pomocą PHD): a tak to widać w FFT: Po raz pierwszy widziałem taki guiding w moim domu. Jak dla mnie to rewelacja (tym bardziej że widoczna przez surowe oko PemPro, bez żadnych wygładzeń i tym podobnych przybliżeń). Na FFT widać wyraźnie 180sek i 10sek. Trzeba jednak koniecznie wymienić łożyska ślimaka i zrobić coś z tym zazębieniem pomiedzy silnikiem a ślimakiem. Te 180sek bardzo przeszkadza też w użyciu PEC. Wygląda na to, że to 480sek ślimaka nie dzieli się całkowitą liczbą przez te 180 sek i to powoduje że "faza wędruje" po wykresie. Zobaczcie sami: Te przebiegi są bardzo podobne, ale cały czas wędrują po osi czasu. Prócz tego znów PemPro nie zagadał z PEC montażu. Mam już zupełnie niezy stan, ale bardzo bym chciał PEC uruchomić. Tyle, ze póki co muszę: - zdobyć nowe łożyska i je wymienić - wymyślić co zrobić z zębatkami (może w PierroAstro mają?) - odkorkować komunikację pomiędzy CGEM a Pempro.
-
Rozdział 7 – PEC Tu nie mam dobrych wyników, przynajmniej do dziś. Wiadomo jednak że warto tą technikę opanować => patrz linki na początku mojego tekstu. Innym użytkownikom udawało się zejść poniżej kilku arcsec bez guidowania. Mój brak wyników wynika z pewnego problemu w połączeniu pomiędzy CGEM a PemPRO. Być może dotyczy to tylko mojego egzemplarza, nie wiem. Inni jakoś nic o tym nie pisali. Otóż okazało się że pomiary jakich dokonałem nie wykazały jakiejkolwiek różnicy pomiędzy guidowaniem z PEC i bez PEC. Co więcej, jak próbowałem skomunikować się z montażem za pomocą PECTool Celestrona otrzymywałem komunikat „This mount does not support the PECTool”. Odpowiedź na to co wtedy zrobić jest tu: http://www.celestron.com/c3/support3/index.php?_m=knowledgebase&_a=viewarticle&kbarticleid=2249&nav=0,216 W moim przypadku wystarczył „factory reset”. Oznacza to, że po upload krzywej PEC do mojego CGEM nie mogę używać PECTool, chyba że wykonam „factory reset”, kasując tym samym PEC z pamięci montażu. Prawdopodobnie ten właśnie problem spowodował też to, że PemPro nie włączał korekcji PEC podczas testów. Rozdział 8 – co dalej Pozostaje mi jeszcze do zrobienia: - zdobycie łożysk i ich zamontowanie, a potem sprawdzenie co to dało - uruchomienie PEC (zacznę od włączania ręcznego na rzeczywistym pilocie, na dziś wiem że upload/download z PemPro działa) - ew. poprawienie mechaniki osi DEC Będę tu informował o dalszym postępie prac. Na razie koniec… cdn…
-
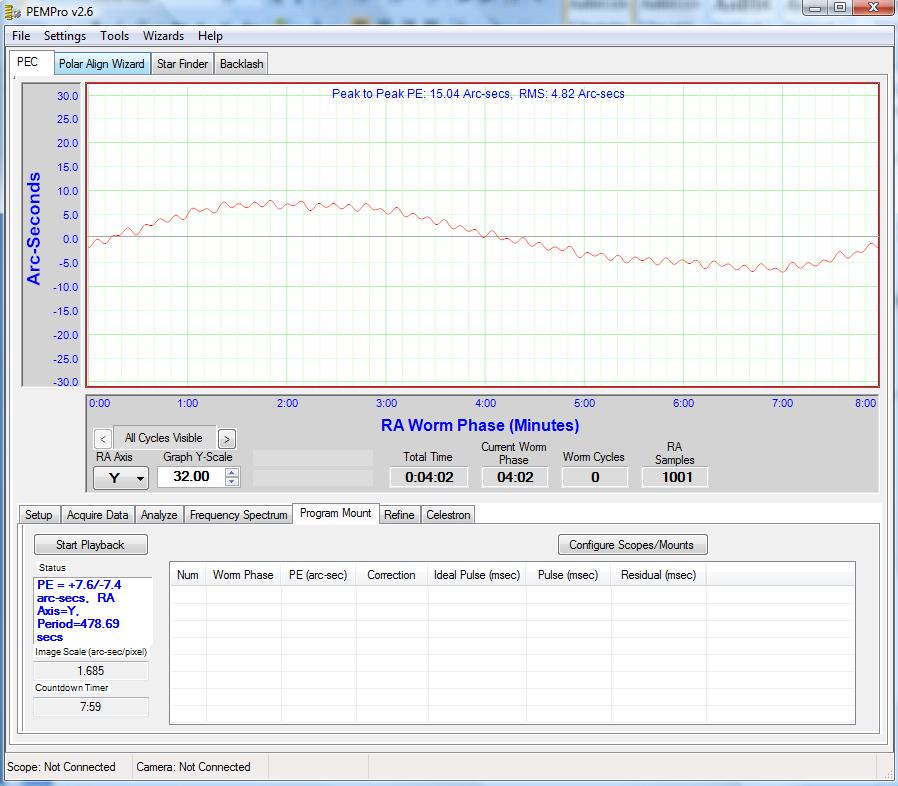
Rozdział 5 – czyszczenie i składanie Czyszczenie jakie wykonałem to dwie główne czynności. Po pierwsze wytarłem ze smaru wałek na którym osadzone są łożyska osi RA, a to w celu ograniczenia ich pracy w „trybie ślizgowym”. Po drugie wyczyściłem ślimaka i ślimacznicę (rozpuszczalnik uniwersalny i szczoteczka do zębów) ze wszelkich zanieczyszczeń i starego smaru. Podobnie postąpiłem z kołami zębatymi napędzającymi ślimaka. Potem nałożyłem bardzo (bardzo!) starannie sporą warstwę nowego smaru (użyłem smaru grafitowego do kół zębatych). Składanie należy wykonać po prostu w kolejności odwrotnej niż rozkładanie. Przy tym czyhają takie zasadzki których należy unikać: - plastikowe podkładki między łożyskami (na wałku 40mm) mogą mieć różne grubości, nie należy więc ich wkładać w inne miejsca niż fabryczne - osadzając łożyska na wałku nie wolno używać młotka ani innych brutalnych metod, gdyż to może je trwale uszkodzić. - ozdobne nakrętki po obu stronach ślimaka trzeba dokręcić z miarę mocno (w EQ6 to jest łatwiejsze zadanie), gdyż ich nie dokręcenie spowoduje że ślimak będzie mógł się przesuwać wzdłuż osi i w ten sposób powstanie spory luz (backlash) w osi RA. - spostrzeżenie: oś RA nie wykonuje całego obrotu w czasie pracy montażu, dlatego kiedy montujemy go z powrotem miejmy świadomość, że łącząc ślimaka ze ślimacznicą dokonujemy wyboru jaka część ślimacznicy będzie od teraz zawsze pracować. W moim opisie pominąłem takie zagadnienia jak: - zadbanie o właściwe przesunięcie koła zębatego na ślimaku, tak aby w pełni zazębiało się z kołem zębatym silnika - zadbanie o regulację docisku (luzu) koła zębatego silnika do koła zębatego ślimaka - regulację luzu zazębienia ślimaka ze ślimacznicą (dwie małe śrubki „robaczkowe” po przeciwnych stronach obudowy ślimacznicy). Ta regulacja jest obowiązkowa po składaniu montażu! Pominąłem, gdyż jest to niejednokrotnie opisane w licznych tutorialach do EQ6. Rozdział 6 – Pomiary po składaniu Po złożeniu i wyregulowaniu mojego CGEM sprawdziłem co teraz okaże się w PemPro. Oto wynik: Jak widać z uprzednich +/-14 arcsec wynik poprawił się do +/-7 arcsec, czyli dwukrotnie lepszy. Całkiem nieźle! Porównanie na jednym wykresie:
-
Rozdział 4 – oględziny osi RA Przyglądając się osi RA (wspólnie z kolegą konstruktorem mechanikiem) doszliśmy do następujących ciekawych wniosków: - smar to nie jest powszechnie znane „chińskie lepiszcze” tylko coś lepszego - łożyska na pierwszy rzut oka nie są takie złe - i tu najciekawsze: łożyska są osadzone na wałku ZA LUŹNO i mają tendencję do pracowania jak łożyska ślizgowe a nie toczne! Najwyraźniej fabryka ułatwiła sobie proces składania montażu, przy takim suwliwym pasowaniu można to robić bez narzędzi. Postanowiłem nie rozkładać montażu na drobne, tylko zmontować go z powrotem po uprzednim wyczyszczeniu, wyregulować, zamówić nowe łożyska. W czasie poszukiwań łożysk i ich sprowadzania - używać jak dotąd. Spis oznaczeń łożysk osi RA: 1) małe łożyska ślimaka: 608Z (średnica zew. 22, wew. 8, szerokość 7) 2) łożysko stożkowe RA: 32208 (średnica koszyka większa ~72, mniejsza ~62, wew 40, szerokość 25) 3) łożyska ślimacznicy i łożysko obudowy osi RA (wszystkie 3 takie same): 6008E-RZ (68 średn. zew, 40 śr wew, szer 15) Wszystko wskazuje na to, że takie same łożyska są w EQ6.
-
Rozdział 3 – Rozmontowanie osi RA Mając wyniki powyższych badań postanowiłem zobaczyć co też dzieje się w środku montażu. Na razie wziąłem się tylko za oś RA (jako tą ważniejszą) aby na niej poćwiczyć i pozostawić sobie ew. ratunkowy punkt odniesienia jakby coś nie poszło w ponownym zmontowaniu. O ile mi wiadomo, nikt jeszcze w sieci nie udostępnił zdjęć z rozmontowywania CGEM, więc niniejszym (werble!) poniżej premiera. Wsadzę tu same zdjęcia, bez szczegółowego opisu – to dlatego że okazuje się że w dużej mierze CGEM jest podobny do EQ6, czyli dobrze opisane tutoriale do EQ6 (linki na początku mojego tekstu) znakomicie wyczerpują temat.
-
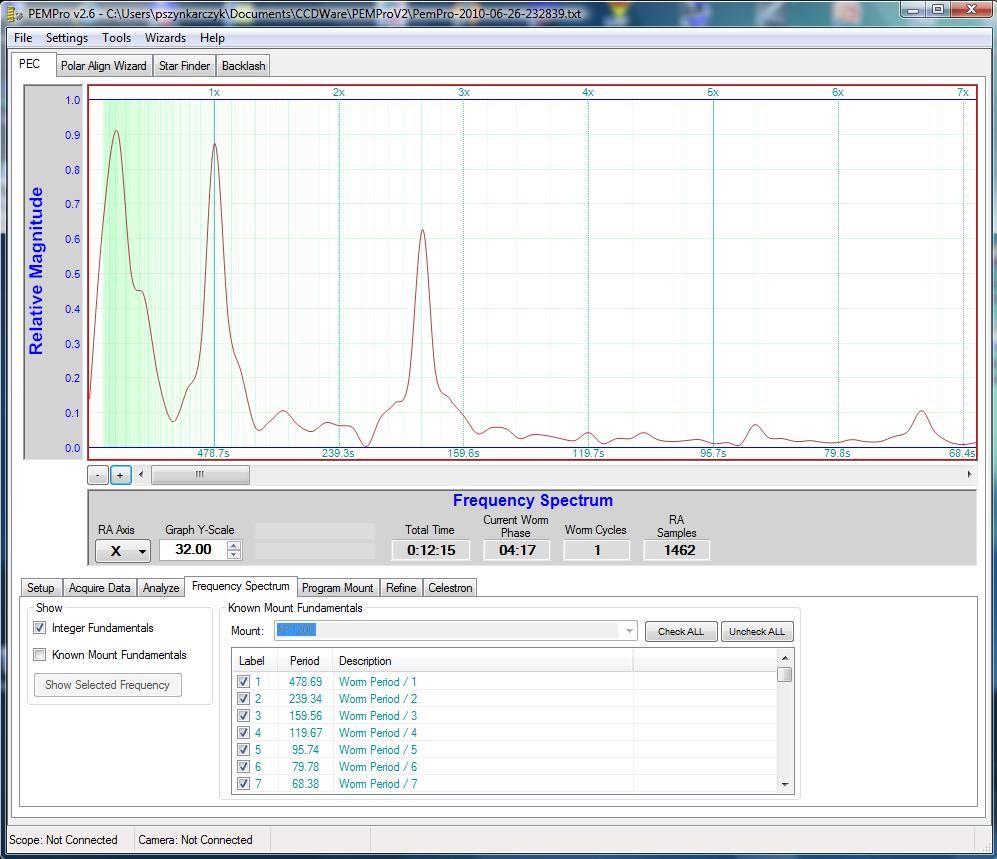
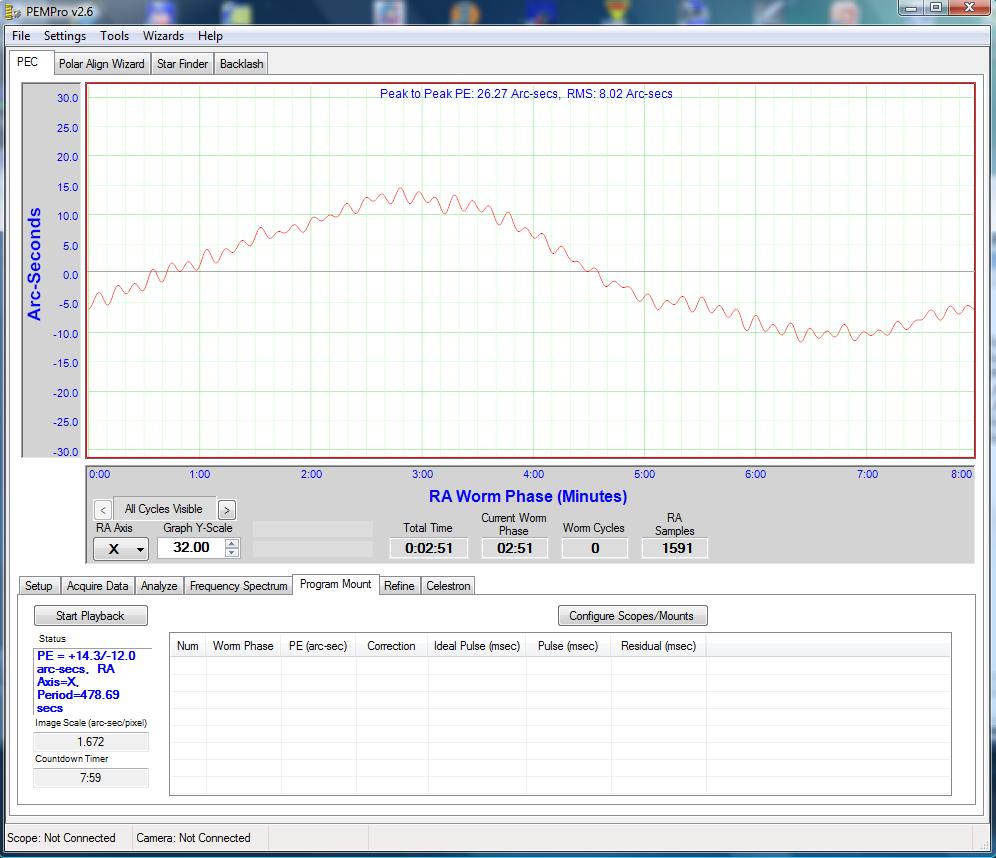
Rozdział 2 – badanie prowadzenia w stanie oryginalnym Temat badania prowadzenie CGEM poruszałem wielokrotnie w tym wątku ( http://forum.astropolis.pl/topic/30126-guiding-cgem-eq6/ ). W szczególności zwracam uwagę na post nr 10 ( http://forum.astropolis.pl/topic/30126-guiding-cgem-eq6/page__view__findpost__p__376674 ) gdzie użyłem PECPrep. Na wykresach w funkcji częstotliwości wybijają się trzy zakłócenia (objaśnienia wg. PECPrep): 1) 480 sekund – czas jednego obrotu ślimaka 2) 180 sekund – czas obrotu kulki w łożysku ślimaka 3) 10 sekund – zębatka napędzająca ślimak (co 10 sekund zazębia się kolejna para zębów) Za jeden z najlepszych programów do przygotowywania krzywej PEC uważany jest PemPRO. Po doświadczeniach z PECPrep postanowiłem tego spróbować, tym bardziej że PemPRO może zrobić bezpośredni upload PEC do montażu. Różnice między programami: - PECPrep zapisuje poprawki z guidera, a PemPro analizuje odchyłki z kamery głównej. - PECPrep jest doskonałym narzędziem diagnostycznym, pozwala na wiele operacji na zapisanych i przygotowywanych krzywych, PemPro już tego nie robi (przynajmniej nie wprost - można kombinować z wgrywaniem pojedynczych krzywych i dokonywać operacji pomiędzy nimi), ale ze to od razu komunikuje się z wieloma montażami. - Instrukcja obsługi do PemPro nie jest łatwa w odbiorze. Oto wynik badania za pomocą PemPro: Widać podobne jak z PECPrep wyniki: 480 sekund (ślimak), 180 sekund(kulka). Niestety wykres FFT w PemPro nie obejmuje swym zakresem czasów 10-sekundowych, ale to zakłócenie ujawnia się na wykresie krzywej korekcyjnej (PEC) Tak więc wyniki z PECPrep i PemPRO są podobne. W PemPro wahania krzywej korekcyjnej ślimaka (PEC) pokazują błędy rzędu +/- 14 arcsec. [uwaga – na zagranicznych forach to jest wykazywane jako pomiar błędu prowadzenia montażu. Moim zdaniem to nie prawda. To nie są błędy montażu, tylko odchyłki krzywej PEC która ma te błędy korygować (a tak naprawdę większość tych błędów, ale nie wszystkie). Ma więc z błędami prowadzenia bezpośredni związek, ale to nie jest to samo.]
-
Witam, Ciąg dalszy sagi o CGEM. Tym razem będzie o rozmontowaniu/smarowaniu/zmontowaniu/regulacji i o PEC wraz z PemPRO. Jeśli ktoś nie wie co te słowa oznaczają, to zaraz się wyjaśni. Rozdział 1 - Motywacja CGEM kiedy pojawił się na rynku budził emocje i nadzieje. Stąd wzięły sie podwyższone jego w stosunku do EQ6 ceny (w USA tak nie było i nie jest) oraz kolejki w oczekiwaniu na dostawy z zapisów. Teraz, z perspektywy czasu (ponad rok doświadczeń moich i innych) mogę napisać że CGEM okazał się montażem który: - jest bardzo wrażliwy na zasilanie (nie toleruje za niskiego napięcia, zbyt mało wydajnego źródła oraz zanieczyszczonych styków) - w starszych wersjach firmware (do 4.15) miewał awarie polegające na odjazdach w bezsensowne pozycje - to jest też typowe zachowanie przy za niskim napięciu lub brudnych stykach - zdarzały się problemy wynikające ze słabego kontaktu elektrycznego w złączu z pilota do montażu oraz wewnątrz montażu (błędy numer 16 i 17 na wyświetlaczu) - wbrew oczekiwaniom nie prowadzi lepiej niż EQ6 - ma jednak swoje zalety (np. ustawianie na polarną bez jej widoczności, bogata biblioteka obiektów, hibernacja, stale działający zegarek, pamiętanie szer. i dług. geograficznej, permanentny PEC, szybkie ruchy, identyfikacja obiektów na niebie, możliwość pełnej kontroli meridian flip, ...) Teraz, w razie problemów wiadomo co zrobić: - błąd 16 lub 17 => sprawdzić wszystko w zasilaniu (stan akumulatora/zasilacza, napięcie, stan styków) oraz styki na połączeniu pilota z montażem - „runaway slews” => zasilanie, faktory reset, upgrade firmware na nowszy - inne problemy: http://www.celestron.com/c3/support3/index.php?_m=knowledgebase&_a=view&parentcategoryid=0 oraz http://www.celestron.com/c3/support3/index.php?_m=knowledgebase&_a=view&parentcategoryid=241&pcid=0&nav=0 Poświęciłem montażowi ostatnio trochę czasu, praca dotyczyła głównie poprawieniu dokładności prowadzenia poprzez: 1) rozmontowanie, wyczyszczenie, nasmarowanie, regulacje, zmontowanie 2) opanowanie PEC Co do pkt 1, to wzorce podobnych działań (ale odnośnie EQ6) można znaleźć w takich linkach http://forum.astropolis.pl/topic/31074-rozpacz-szarego-usera-nierowna-walka-z-eq6/ (dziękuję Hansowi za pomoc) http://www.astro-baby.com/EQ6%20rebuild%20guide/EQ6%20RA%20strip%20down.htm http://ejcruz.smugmug.com/Photography/EQ6-Pro-Assembling-RA/11245351_SHPoX#788696838_s3Yen http://www.beevo.com/rework.htm http://picasaweb.google.co.uk/darren.jehan/Mount# Odnośnie pkt 2, tu widać że przynosi to rezultaty: http://ccdware.infopop.cc/eve/forums/a/tpc/f/401101098/m/855103634 http://www.cloudynights.com/ubbthreads/showflat.php/Cat/0/Number/3596177/page/3/view/collapsed/sb/5/o/all/fpart/all/vc/1 http://www.veryamateur.co.uk/2010/03/24/periodic-error-correction-with-the-cgem/ http://www.cloudynights.com/ubbthreads/showflat.php?Cat=&Board=lxd55&Number=3632737&Forum=,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,All_Forums,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,&Words=&Searchpage=15&Limit=25&Main=3628572&Search=true&where=&Name=10854&daterange=&newerval=&newertype=&olderval=&oldertype=&bodyprev=#Post3632737
-

Fotorelacja z pobytu w Tivoli
piotrs odpowiedział(a) na Piotrek Sadowski temat w Głęboki Kosmos (DS)
Z przyjemnością się to ogląda. Chyba trudno było wybrać te zdjęcia spośród wielu. Puchowe kurtki - wiedzieliście że trzeba wziąć czy to były miejscowe? -
Trzeba może obciąć margines gdzie koma wali po oczach, ale generalnie jest to niezły dowód na to że i taką prostą rurką można powalczyć. Fajne.
-
Jak sie kupuje sprzęt używany, to pewnie kilkaset do tysiąca zł wystarczy (tzw. ręczniak czyli radiotelefon UKF + antena + kabel antenowy). http://gielda.radio.org.pl/ http://gielda.qrz.pl/ http://hamradio.pl/sq9jdo/_Sprzet/gieldy.html itd ... P.S. Coś co może nadawać, to już lepiej kupować jak się ma do tego uprawnienia, czyli licencję krótkofalarską (czyli zgadzam się z przedmówcą)
-
Częstotliwości: http://www.zarya.info/Frequencies/FrequenciesISS.php Do odebrania tylko za pomocą specjalnego sprzętu radioamatorskiego, odbierającego te zakresy częstotliwosci. Żadne radio "domowe" tego nie zrobi. Spośród powszechnie dostępnych są tzw. "global receiver" (Philips takie kiedyś sprzedawał) i to daje redę. Podobnie można liczyć na tzw. skanery (odbiornik działajacy w szerolim zakresie, dedykowany dla maniaków podłuchiwania np. samolotów i innych służb ). Tyle że to są tylko substytuty. 143.625 MHz jest najciekawsza, ponieważ to jest częstotliwość na której często operują Rosjanie z ziemi i jak są jakieś krytyczne manewry (np. otwarcie luku po dokowaniu) to zwykle to się dzieje w naszym zasięgu. Aby coś tu "upolować' trzeba znać rozkład zajęć załogi (czy akurat nie śpią) i ogólnie co tam się ciekawego dzieje na orbicie. 145.800 MHz jest tylko do łączności ze szkołami itp. Taka propaganda, program nazywa się ARISS i wymaga składania wniosków i idzie wg harmonogramu, ale posłuchać można. Zdarza sie też że ISS (a dawniej MIR) nadaje obraz w modulacji SSTV (tzw. amatorska telewizja). To daje się odbierać takim samym radiem + prosty interace + dostępny za free soft. Do tego wszystkiego przydatna jest także porządna antena, przystosowana do odbioru sygnału z orbity (a nie horyzontalnie z ziemi), ale to też jest łatwe do zrobienia. Generalnie ten temat jest obszerny, dużo daje się znaleźć w sieci i jest to tylko czubeczek góry lodowej tematyki za tym stojącej i związanej z działalnością radioamatorską.
-
Kanarkusmaximus - wszystkiego najlepszego!
piotrs odpowiedział(a) na mlody188 temat w Społeczność AP (Rozmowy o wszystkim)
Wejścia na orbitę albo i dalej, ale nie za $$$ tylko jako członek załogi! Prócz tego wszystkiego inego co uszczęśliwia. -
Szczery podziw.
-
Chatka puchatka, czyli obserwatorium.
piotrs odpowiedział(a) na Amper temat w Obserwatoria i planetaria
Witam, W pojedynkę to jest wyzwanie. Doskonale rozumiem Twoje zmęczenie. Tylko dlaczego ganiałeś z tymi taczkami taki kawał? Czy sprawdziłeś głębokość przemarzania gleby w Twojej lokalizacji? Głębokość fundamentów powinna być większa niż głębkokość przemarzania. http://www.budujemydom.pl/abc/329/ Chcesz tam mieć prąd (albo internet, alarm, ...)? Jeśli tak, to kable łatwiej doprowadzić kiedy jeszcze nia ma domku. Lokalizacja wyglada nieźle! Wytrwałości, pozdrawiam. -
Satelitarna transmisja na żywo z "robota na Marsie"
piotrs odpowiedział(a) na piotrs temat w Kosmonautyka
Witam, Wyniki zawodów: MAGMA zajęła 3 miejsce!!! Do zawodów zgłosiło się 12 zespołów, przyjechało 7, w tym tylko 1 (MAGMA) z Europy. Retransmisję konferencji prasowej można zobaczyć tu: http://www.piap.pl/transmisja_z_marsa/ Punkatacja: 1.Oregon State University (315 points) 2.York University (209 points) 3.Magma Team, Poland (203 points) GRATULACJE i czekamy na następne sukcesy.
-
Satelitarna transmisja na żywo z "robota na Marsie"
piotrs odpowiedział(a) na piotrs temat w Kosmonautyka
Kto nie oglądał transmisji wczoraj ma czego żałować. Emocje, suspens, kibicowanie, dramaty, adrenalina, zwroty akcji, i na koniec wielki finał. Tak było. Oficjalny komunikat brzmi: Ekipa Magmy zdobyła dużą ilość punktów, co daje szanse na wysoką lokatę. Więcej szczegółów i wywiady z ekipą na konferencji prasowej już 9.06.2010 (środa) po g.13:00 czasu polskiego. -
No chłopie, zaszalałeś ;-)
-
Satelitarna transmisja na żywo z "robota na Marsie"
piotrs odpowiedział(a) na piotrs temat w Kosmonautyka
Druga część transmisji jest planowana dziś około 21:00 -
Satelitarna transmisja na żywo z "robota na Marsie"
piotrs odpowiedział(a) na piotrs temat w Kosmonautyka
Pierwsza konkurencja za nami. MAGMA spisała się bardzo dobrze, szzególnie że kilka poprzednich robotów nie wytrzymało upału i stanęły ;-) Póki co nasi górą! Jutro, w godzinach wieczornych możliwe dalsze relacje. Stay tuned... -
Satelitarna transmisja na żywo z "robota na Marsie"
piotrs odpowiedział(a) na piotrs temat w Kosmonautyka
Witam, To dziś! Objaśnienie w Wikipedii: http://pl.wikipedia.org/wiki/University_Rover_Challenge : "University Rover Challenge, URC – konkurs robotów organizowany przez stowarzyszenie The Mars Society. Zawody odbywają się na początku czerwca lub pod koniec maja, w USA, na pustyni w stanie Utah, w okolicach Mars Desert Research Station (MDRS) – symulowanej bazy marsjańskiej." Garść filmów: ("Skarabeusz" to zeszłoroczny polski zawodnik. Zajęli przedostatnie miejsce, ale to dlatego że przesyłka z robotem dotarła z opóźnieniem i wzięli udział TYLKO w JEDNEJ konkurencji) Zadania do wykonania: 1) Zadanie inspekcyjne Na podstawie mapy dojechać 0,8km i z zadanego punktu obserwacyjnego wyznaczyć położenia (wraz z wysokością) kilku zaznaczonych markerami punktów terenu. Zespół ma max 50minut na dojazd, 15 minut na obliczenia 2) Pobranie i przywóz próbki W promieniu 0,8km wyznaczony zostanie cel z którego robot musi przywieźć samodzielnie pobraną próbkę 25...250g potencjalnie zawierającą życie. Zadanie uzupełnione jest o ocenę próbki, czyli liczy się nie tylko samo dojazd i pobranie próbki ale i jej jakość (czyli ile jest w niej faktycznie tego życia). Robot może posługiwać się pokładową aparaturą pomiarową w celu wybrania najlepszej próbki. Czas: 30...60 minut 3) Misja ratunkowa Zaginął astronauta. Wiemy gdzie był ostatnio, ale mógł się oddalić od tego miejsca. Jest nie dalej niż 1,5 km od nas. Trzeba go odnaleźć i dostarczyć mu pakiet ratunkowy (paczka 6kg). Czas max 60 minut. Wygra najszybszy robot. 4) Misja inżynierska W odległości max 500m leży aparatura którą trzeba złożyć i uruchomić. Robot musi tam dojechać, za pomocą kamer robota operator przeczyta instrukcje, a następnie za pomocą manipulatora trzeba wykonać zadanie. Trzeba będzie przełączać włączniki, wciskać guziki, podłączyć wtyczkę.