Behlur_Olderys
-
Postów
5 186 -
Dołączył
-
Ostatnia wizyta
-
Wygrane w rankingu
12
Typ zawartości
Profile
Forum
Blogi
Wydarzenia
Galeria
Pliki
Sklep
Articles
Market
Community Map
Treść opublikowana przez Behlur_Olderys
-

Grzanie się silnika krokowego
Behlur_Olderys odpowiedział(a) na maciekkacper temat w Dyskusje o sprzęcie
Chciałbym trochę odgrzebać temat, bo wolę dwa razy się dopytać, niż w milczeniu spalić silnik/sterownik/zasilacz/mieszkanie Mam silniczek o znamionowych parametrach: 12V, R cewki = 24Ohm, prąd na cewkę 0.5A (nic dziwnego ) Należałoby więc - jak mniemam - zasilać wszystko przynajmniej 12V 1A zasilaczem, żeby było po bożemu (2 cewki). Ale ja mam tylko 12V 800mA albo 24V 500mA Czy używając wspomnianego DRV8825 jest szansa, że po prostu ustawię mu limit na 0.5A i podłączę do 24V zasilacza, i nie spali mi silnika? Czy lepiej po prostu podłączyć 12V 800mA, ustawić limit na 400mA i pogodzić się z 20% spadkiem momentu (jak mniemam) ? Pozdrawiam! -
Istnieją też rozwiązania bazujące na podwójnym ramieniu, być może prostsze do implementacji:
-
Skoro już temat jest dość luźny, to pozwolę sobie na komentarz w tej sprawie. Samo "zlepianie się" protonów nie jest czymś nadzwyczajnym, można to zrobić spokojnie na Ziemi. Kluczowym momentem w syntezie helu jest bardzo rzadki rozpad He He-2 -> H-2 + e+ + ve Najczęściej zbitek dwóch protonów powstały po zderzeniu (jądro helu-2) rozpada się z powrotem na 2 protony. Czyli nic się nie dzieje. Tymczasem bardzo rzadko (wg angielskiej wikipedii - przeciętnie raz na miliard lat!) jeden z protonów w jądrze He-2 rozpada się na neutron, pozyton i antyelektronowe neutrino, zgodnie z powyższym wzorem, tworząc stabilne już jądro deuteru, który może brać udział w dalszych reakcjach, z których Słońce czerpie większość energii (tutaj wydzielane jest tylko ok. 15% energii całego cyklu pp-I którego efektem jest jedno jądro ultrastabilnego helu-4, reszta to synteza deuter + proton -> hel-3 helu-3 + hel-3 -> hel-4) W pewnym sensie reakcja ta jest "puszczonym wstecz filmem" ukazującym oddziaływanie neutrina z jądrem deuteru. Dlatego jest tak rzadka - bo bardzo mała jest szansa, że neutrino z czymkolwiek będzie oddziaływać. Ze względu na to, że oddziaływania słabe (czyli m.in. występujące pomiędzy neutrinami a resztą materii) są właśnie takie słabe, a więc statystycznie bardzo rzadkie, to dlatego Słońce może tak długo świecić. Inaczej, gdyby ta reakcja była bardziej prawdopodobna, to wodór spaliłby się bardzo szybko w Słońcu.
-
Średnica soczewki a obiektywy szerokokątne
Behlur_Olderys odpowiedział(a) na arctur34wp temat w Dyskusje o sprzęcie
Sugerujesz, że w bezlusterkowcach nie ma takiego czegoś? (Nie wiem, dlatego pytam). A co z obiektywami typu naleśnik? -
Optycznie taka sobie fotka, ale to obiektyw, natomiast prowadzenie chyba ok? Może spróbować zmniejszyć odstęp między prowadnicami? Wiem z doświadczenia, że w drukarce też można znaleźć 6mm wałki, gładziutkie i sztywne, może warto poszukać po sąsiedzkich piwnicach? Najlepiej, gdyby prowadnice były podparte z obu stron (przed wózkiem i za wózkiem) no i w płaszczyźnie horyzontalnej a nie wertykalnej. No, ale wtedy powoli robi Ci się inny typ montażu Dla mnie 25 minut to za krótko, żeby mi się chciało robić.
-
Zlodowacenia i ocieplenia - wpływ Słońca, ludzi i inne
Behlur_Olderys odpowiedział(a) na ekolog temat w Planeta Ziemia
Rzeczywiście, aborcja to jedyne wyjście z tej nieuchronnej wizji, która na pewno czeka ludzkość za 1000 lat -
Zlodowacenia i ocieplenia - wpływ Słońca, ludzi i inne
Behlur_Olderys odpowiedział(a) na ekolog temat w Planeta Ziemia
O, dawno nie czytałem mniej popartej dowodami i bazującej na nieprawdziwych założeniach tezy... 1. Jakie przeludnianie? 2. Wytłumacz Twoje wnioskowanie?- 545 odpowiedzi
-
- 1
-

-
- globalne
- ocieplenie
- (i 5 więcej)
-
No i super! Powinno śmigać jak złoto, przez te 25 minut Na jakich wałkach chodzą te łożyska liniowe? Pewnie są za cienkie i się wyginają pod ciężarem napędu. Masz jakieś fotki z tego?
-
Moim zdaniem to 25mm z mikrometrem powinno działać nawet na prostym ramieniu bez udziwnień. A wydaje mi się, że parę linijek kodu w arduino łatwiej dopisać, niż frezować jakąś parabolę
-
Eee takim malutkim mikrometrem to ile ty to poprowadzisz, 5 minut?
-
Cokol 1. Nie sądzę aby napęd działał dłużej jak 60 minut w jednym przebiegu więc rozważania w zakresie 3 godzin są chyba czysto teoretyczne. Wydaje mi się, że to sztuczne ograniczenie. Najlepiej, żeby działał całą noc. 2. Krok rzędu 5arcsec/sek jest zbyt duży aby przyjmować go w praktyce, proponuję trzymać się zasady znanej z kina: zmiany powinny być nie rzadsze niż kilkanaście razy w ciągu sekundy co usunie migotanie przy obserwacji wizualnej. Dlatego należałoby przyjmować krok nie większy niż 1arcsec/sek. Nie do końca wiem, o co Ci chodzi. Nigdzie nie użyłem wyrażenia 5arcsek/s, więc nie wiem, czy mówisz o skali, czy o prędkości ruchu, czy o czym w ogóle. Przy obserwacji wizualnej w ogóle nie musisz mieć dokładności w arcsek, wystarczy, że obraz trzyma się jakoś w miarę w polu okulara. Pewnie kontrola rzędu +/- kilka minut łuku wystarczy w zupełności. Do wizuala w ogóle nie ma sensu używać koziołka, lepiej sobie kręcić ręką najtańszy paralaktyk na mikroruchach, albo używać platformy do Dobsona. Koziołek jest - moim zdaniem - tylko do astrofoto. 3. Zastanów się, w którym momencie ustawienie na Polaris jest ważniejsze od dokładności prowadzenia
-
A jaki montaż?
-
człowiek aż przeciera monitor - czy to kurz, czy kłaczek
-
Dopóki po każdej sesji "przewijasz" koziołka na start Używając mojego "standardowego" przykładu (jest on o tyle przydatny, że wychodzi w nim z dużym przybliżeniem dokładność 5arcsek/krok i jeszcze większym przybliżeniem 1 obrót śruby/ 1 min) 200mm ramię 1mm skok śruby 200 kroków na obrót, i dodatkowo optyka: 200mm obiektyw + 5um piksel = skala ok. 5 arcsek / piksel Tymczasem Ziemia zasuwa 360stopni na ~24h = 15arcsek/sekundę. Już po ok. godzinie "jechania" na prostej śrubie bez korekty cosinusem powinny zacząć wychodzić błędy rzędu 3ms opóźnienia / krok. Oznacza to, że jeśli palisz klatki po 1 minutę = ok. 200 kroków = ok. 600ms opóźnienia dla klatki = 0.6 * 15 = 9arcsek pojechania, czyli prawie 2 pikselowe kreski. To nie tak źle Po dwóch godzinach kreski mają już 8 pikseli, a po 3h - 18 pikseli. To już sporo. EDITED: zamiast cos(t) można śmiało użyć funkcji 1 - (t^2/2). Jest łatwiejsza do policzenia, a błąd do kosinusa jest skrajnie mały. Później, dla jeszcze lepszej dokładności można dołożyć wyraz czwartego rzędu: 1 - t^2/2 + t^4/24 i tak dalej - wciąż jesteśmy (chyba) szybsi od liczenia cosinusa EDITED2: Dlatego mówię: samo prowadzenie może być w teorii bardzo dokładne. Ale co z tego, jak montaż telepie się na wietrze i nie da się go porządnie ustawić na Polaris? Ktoś może ma wzór na pojechanie klatki w zależności od błędu ustawienia bieguna? Bez guidingu oczywiście
-
Ja do końca nie rozumiem tych Twoich aluzji/ironii, Fotosnajper Do czego zmierzasz?
-
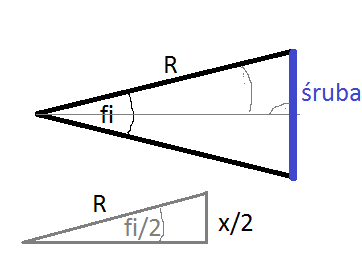
Obiecany wzór: Skoro w nożycach mamy trójkąt równoramienny, to najłatwiej policzyć połowę przesunięcia: x/2. Dla połowy nożyc x/2 oraz promień R tworzą dwa boki trójkąta prostokątnego o kącie rozwarcia fi / 2. Fi to kąt rozwarcia całego napędu i powinien spełniać zależność od czasu: fi = omega * t, gdzie t to czas w sekundach od włączenia montażu z pozycji 0 (zero rozwarcia), a omega to prędkość obrotowa Ziemi w radianach na sekundę (nie pamiętam dokładnie, ogólnie 2 * pi / (doba gwiezdna) ) Dla wspomnianego trójkąta prostokątnego łatwo policzyć, że sin(fi/2) = x / (2 * R). A zatem szukana najpierw zależność przesunięcia od czasu to: x(t) = 2 * R * sin ( omega * t / 2). Następnie chcąc policzyć zależność prędkości od czasu należy obliczyć pochodną tego wyrażenia po t (czasie). Wychodzi, że dx/dt = v (prędkość przesunięcia w m/s) = (1/2) *omega*2*R *cos ( omega * t /2), czyli po prostu: v(t) = R * omega * cos(omega * t / 2). Łatwo sprawdzić, że gdybyśmy mieli śrubę wygiętą, to wzór byłby po prostu R*omega, natomiast prosta śruba będzie wraz z kosinusem połowy kąta rozwarcia obracała się coraz wolniej. Żeby zamienić prędkość w m/s na obroty silnika po prostu dzielimy to przez przełożenie śruby, np. v = 2.4mm/s, skok śruby h=0.8mm (M5) => v / h = 3 obroty na sekundę, albo h / v = 1/3 sekundy na obrót. A jeśli sterujemy silnikiem krokowym to interesuje nas ile czasu dt mamy zmierzyć pomiędzy kolejnymi krokami. Zależność wychodzi wtedy: Dla silnika n = 200 (kroków na obrót): 1/600 sekundy na krok. Ogólny wzór: dt(t) = h / (v (t) * n) = ( po rozwinięciu): dt(t) = h / (R * omega * cos(omega * t / 2) * n) I jeszcze obrazek na poparcie geometrii:

-
500mm to dla kamery z pikselem 4,3um (np. Canon 700d) skala 0.8 arcsek/pixel. Pomnóżmy x5 żeby wciąż jeszcze jakoś to wyglądało: wymagana dokładność prowadzenia wychodzi <4 arcsek. Oznacza to np. dla ramienia 200mm dokładność ruchu śruby do 4um, mniej więcej, tj. 1/250 obrotu dla śruby M6. Wydaje się mało, bo teoretycznie wystarczy krokowiec 200 kroków na obrót sterowany półkrokami. Ale 4um stabilności śruby i nakrętki bez luzów łożyska itp - to wcale nie takie proste. Zapytaj kolegów-zawodowców, jakie mają PE w swoich montażach za 10k zł A poza tym czemu zamykać się na takie dokładności, jak możnaby lepiej? Ale to już moje fantazje Co do wzoru na prędkosć: gdzies kiedyś pisałem, teraz sobie nie przypomnę, może jutro w pracy tu przykleję jeszcze raz Pozdrawiam!
-
Pierwsze fotki z napędem (z EQ3-2)
Behlur_Olderys odpowiedział(a) na astrotripper temat w Głęboki Kosmos (DS)
Świetny szczegół i kolor na mgławicy! Przypomina mi zdjęcie narrowband, nie wiem czemu -
Są konkretne wzory zależności prędkości ruchu od kąta rozwarcia, wystarczy zaprogramować odpowiednio sterownik silnika krokowego - to prosta geometria. Dowolna dokładność prowadzenia bez sprzężenia zwrotnego (guider lub enkoder) to niestety raczej mrzonka. Trzeba by dysponować idealnie wyszlifowanymi śrubami napędowymi, idealnie dopasowanymi nakrętkami, idealnie zbudowanym krokowcem, idealnie bezluzowym łożyskowaniem itp. itd. Jednak dysponując niedoskonałymi elementami można poprawić dokładność, jeśli jesteśmy w stanie zmierzyć dokładność prowadzenia i na podstawie tego pomiaru korygować napęd. Stawia to dużo większe wymagania dla programowania sterownika (to już poważny program, a nie zwykły timer) oraz - przede wszystkim - trzeba ten enkoder jakoś zdobyć/zbudować/kupić/zaimplementować. Chyba że idziemy w guider, wtedy można skorzystać z pół-gotowych rozwiązań, ale jakoś słabo widzę koziołka/nożyce z guiderem, to się mija z celem chyba Pozdrawiam!
-
Umiejętność czytania między wierszami, wyławianie znaczenia z kontekstu i radzenie sobie w sytuacjach wieloznacznych lub niejasnych odróżnia człowieka od maszyny
- 30 odpowiedzi
-
- 1
-
-
- neo
- Dzień Planetoid
- (i 3 więcej)
-
Hahaha Na razie z przełomowych rzeczy robię mimośrodowy napęd do pompki laktatora dla Żony, więc może trzeba będzie trochę poczekać ale nie ukrywam, mam kilka ciekawych pomysłów! Pozdrawiam! PS właśnie napęd musi być precyzyjny, owszem, ale stabilna podstawa, łatwość obsługi, mobilność, ogólna sztywność i solidność wykonania plus niuanse takie, jak ustawienie na polarną, mocowanie aparatu (obiektywu?), połączenie z PC, zasilanie, odporność na wilgoć czy nawet wpływ rozszerzalności termicznej - to też realne problemy, którym trzeba stawić czoło! Dobrze, że mam sporo czasu na przemyślenia
-
Dla opinii publiczej trzeba używać określeń możliwie najprzystępniejszych. To moim zdaniem jedyne kryterium dobierania porównań - służą po to, by coś wytłumaczyć. Gdy wytłumaczenie wymaga wytłumaczenia- to już wykład
-
Historie i historyjki związane z astronomią choć trochę
Behlur_Olderys odpowiedział(a) na ekolog temat w Społeczność AP (Rozmowy o wszystkim)
Może powinieneś ostrzec autorów tego pomysłu - żeby na Ziemię nam coś nie nawiali! -
Historie i historyjki związane z astronomią choć trochę
Behlur_Olderys odpowiedział(a) na ekolog temat w Społeczność AP (Rozmowy o wszystkim)
Ojej, ktoś może zastosować tą metodę do wywiewania protonów sprzed statku pędzącego przez kosmos z prędkością 0.9c -
Kupię Kupię Canon 70-200 2.8 EF L II USM
Behlur_Olderys odpowiedział(a) na dargeo temat w Giełda: Archiwum
A czemu nie tamrona albo sigmę o podobnych parametrach i dużo tańszych?