- 0

-
Market
-
Ostatnio przeglądający 0 użytkowników
- Brak zarejestrowanych użytkowników przeglądających tę stronę.
-
Polecana zawartość
-

Astropolis Market - nowa platforma zamiast Giełdy
Adam_Jesion opublikował(a) temat w Sprawy techniczne,
Jak już niektórzy z was zapewne zauważyli, testuję nową usługę na Astropolis - Market. Jej celem jest próba zorganizowania (zdemokratyzowania) sprzedaży na Astropolis - zarówno tej giełdowej (niekomercyjnej), jak i tej bardziej zorganizowanej - czyli w pełni komercyjnej. Coraz więcej jest na Astropolis osób i podmiotów, które albo już próbują sprzedawać w partyzancki sposób wśród wątków giełdowych, albo pytają administrację o pozwolenie na rozpoczęcie takiej działalności.-
- 259 odpowiedzi

Wybrany przez
Adam_Jesion, -
-
Migracja Astropolis na nowy serwer - opinie
Adam_Jesion opublikował(a) temat w Sprawy techniczne,
Kilka dni temu mogliście przeczytać komunikat o wyłączeniu forum na dobę, co miało związek z migracją na nowy serwer. Tym razem nie przenosiłem Astropolis na większy i szybszy serwer - celem była redukcja dosyć wysokich kosztów (ok 17 tys rocznie za dedykowany serwer z administracją). Biorąc pod uwagę fakt, że płacę z własnej kieszeni, a forum jest organizacją w 100% non profit (nie przynosi żadnego dochodu), nie znalazłem w sobie uzasadnienia na dalsze akceptowanie tych kosztów.-
-
- 60 odpowiedzi
Wybrany przez
Adam_Jesion, -
-
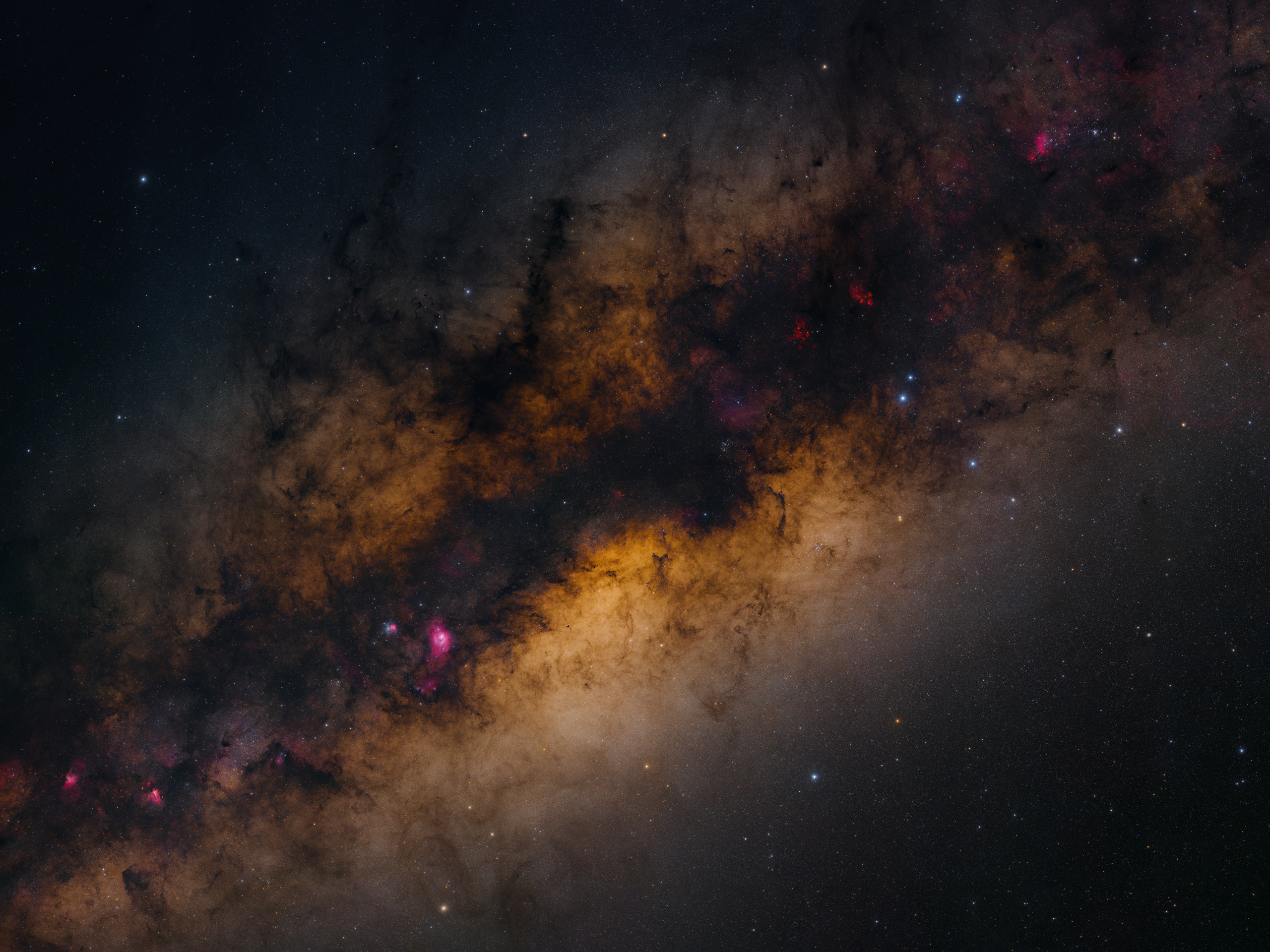
Droga Mleczna w dwóch gigapikselach
bartoszw opublikował(a) temat w Głęboki Kosmos (DS),
Zdjęcie jest mozaiką 110 kadrów, każdy po 4 minuty ekspozycji na ISO 400. Wykorzystałem dwa teleskopy Takahashi Epsilon 130D i dwa aparaty Nikon D810A zamocowane na montażu Losmandy G11 wynajętym na miejscu. Teleskopy były ustawione względem siebie pod lekkim kątem, aby umożliwić fotografowanie dwóch fragmentów mozaiki za jednym razem.-
-
- 53 odpowiedzi
Wybrany przez
Adam_Jesion, -
-
Przelot ISS z ogniskowej 2350 mm
bartoszw opublikował(a) temat w Inne zdjęcia i filmy,
Cześć, po kilku podejściach w końcu udało mi się odpowiednio przygotować cały sprzęt i nadążyć za ISS bez stracenia jej ani razu z pola widzenia. Wykorzystałem do tego montaż Rainbow RST-135, który posiada sprzętową możliwość śledzenia satelitów.
Celestron Edge 9,25" + ZWO ASI183MM. Czas ekspozycji 6 ms na klatkę, końcowy film składa się z grup 40 klatek stackowanych, wyostrzanych i powiększonych 250%.
W przyszłości chciałbym wrócić do tematu z kamerką ASI174MM, która z barlowem 2x da mi podobną skalę, ale 5-6 razy większą liczbę klatek na sekundę.
Poniżej film z przelotu, na dole najlepsza klatka.-
-
- 73 odpowiedzi
Wybrany przez
Adam_Jesion, -
-
Big Bang remnant - Ursa Major Arc or UMa Arc
.zombi. opublikował(a) temat w Głęboki Kosmos (DS),
Tytuł nieco przekorny bo nie chodzi tu oczywiście o Wielki Wybuch ale ... zacznijmy od początku.
W roku 1997 Peter McCullough używając eksperymentalnej kamery nagrał w paśmie Ha długą na 2 stopnie prostą linie przecinajacą niebo.
Peter McCullough na konferencji pokazał fotografię Robertowi Benjamin i obaj byli pod wrażeniem - padło nawet stwierdzenie: “In astronomy, you never see perfectly straight lines in the sky,”-
- 21 odpowiedzi
Wybrany przez
Adam_Jesion, -
-













Pytanie
Miesilmannimea
Dobry")
Czekając aż coś będzie widać siedzę i wymyślam")
Założenie: guidowanie prowadzone tylko w osi Ra, os DEC bez korekty.
Pytanie: czy nie można ustawić guidera pod kątem prostym do osi obrotu Ziemi
czyli w okolice równika niebieskiego, zamiast celować tam gdzie patrzy teleskop główny?
Przy takim ustawieniu "pojechanie" gwiazd będzie najwyraźniej widoczne więc powinno
być łatwiej guidować...
Źle myślę?")
M.
Odnośnik do komentarza
Udostępnij na innych stronach
22 odpowiedzi na to pytanie
Rekomendowane odpowiedzi
Dołącz do dyskusji
Możesz dodać zawartość już teraz a zarejestrować się później. Jeśli posiadasz już konto, zaloguj się aby dodać zawartość za jego pomocą.