Behlur_Olderys
-
Postów
5 147 -
Dołączył
-
Ostatnia wizyta
-
Wygrane w rankingu
12
Typ zawartości
Profile
Forum
Blogi
Wydarzenia
Galeria
Pliki
Sklep
Articles
Market
Community Map
Treść opublikowana przez Behlur_Olderys
-
Maffei 2 - walka trwa
")
-
-
To że lubię "naturalnie" nie znaczy, że nie lubię "nienaturalnie"
-

Dobrzy ludzie, pomocy - prowadzenie montażu (odc 132)
Behlur_Olderys odpowiedział(a) na kubaman temat w Dyskusje o astrofotografii
Jak czytam to: https://www.cloudynights.com/topic/691056-my-cem120ec2-21-months-in/ To tylko wentylator przychodzi mi do głowy. Albo błąd w sofcie. Oprócz kamery masz jakieś wentylatory? -
Dobrzy ludzie, pomocy - prowadzenie montażu (odc 132)
Behlur_Olderys odpowiedział(a) na kubaman temat w Dyskusje o astrofotografii
W sensie z głównej i z guidera? -
Dobrzy ludzie, pomocy - prowadzenie montażu (odc 132)
Behlur_Olderys odpowiedział(a) na kubaman temat w Dyskusje o astrofotografii
Świetnie. Koniec pierwszego sezonu był rewelacyjny. Można pokusić się o podsumowanie dotychczasowych danych, żeby łatwiej analizować i wprowadzić pewną systematykę? @kubaman, może chcesz uzupełnić poniższy formularz? Objaw jest taki, że gwiazdki uciekają nawet bez guidingu i bez enkodera. - W której osi? RA? DEC? Obu? Co to za kierunek? - Jak szybko ("/s) uciekają? * bez guidingu i bez enkodera? * bez guidingu ale z enkoderem? * z guidingiem i enkoderem? - czy zmienia się kierunek ucieczki czy to wciąż ten sam, tylko różne amplitudy? Drugi objaw, to że gwiazdki magicznie wracają na swoje miejsce nawet z wyłączonym enkoderem (to już moim zdaniem jest totalna magia) - po jakim czasie wracają? A może po osiągnięciu jakiegoś konkretnego przesunięcia? - jak szybko ("/s) wracają? I jeszcze jedno pytanie w ramach ciągu dalszego inwestygacji: Z tego, co zrozumiałem, filmik z uciekającą i wracającą gwiazdą pokazywał obraz z kamery głównej. Jestem ciekaw, jaki byłby nagrany w tym samym momencie filmik z kamery guidera? Ale nie wykres PHD (bo ten wiadomo jaki jest) tylko normalnie filmik / sekwencja zdjęć z widocznymi gwiazdami. -
To krócej powiedzieć, niż "sprawia wrażenie nie nadto przeprocesowanego" - bo to mam na myśli. To - w moim subiektywnym odczuciu - taki wygląd zbliżony do tego, co widuję na gołych RAW-ach.
-
Bardzo ładnie wygląda, naturalnie - bym powiedział. Gdy patrzy się na gwiazdki Trapezu to widać, że mogłeś ugrać trochę rozdzielczości jakbyś spróbował tak z 10-20x skrócić czas naświetlania Widać składnik E, jeśli wie się, gdzie powinien być
-
Perseverance - najbardziej wyrafinowany pojazd na innej planecie
Behlur_Olderys odpowiedział(a) na ekolog temat w Kosmonautyka
Dźwięk też jakiś taki [niezrozumiałe]... -
Dobrzy ludzie, pomocy - prowadzenie montażu (odc 132)
Behlur_Olderys odpowiedział(a) na kubaman temat w Dyskusje o astrofotografii
Ja bym jeszcze nagrał sekwencję zdjęć po 0.1s lub filmik 10FPS o długości 10-20min. Główną kamerą, możesz zrobić jakieś ROI żeby nie ważyło terabajtów. Analiza tego filmiku, czyli tak naprawdę charakterystyka czasowa tych ruchów - moim zdaniem znacznie pomogłaby w diagnozie. Co innego, jak by się okazało, że raz na minutę robi się duży skok, co innego, jak w losowych momentach.... ogólnie więcej danych by było do analizy. Plus jest taki, że jeśli to nie jest wina guidingu, to taki filmik możesz nagrać nawet w dzień -
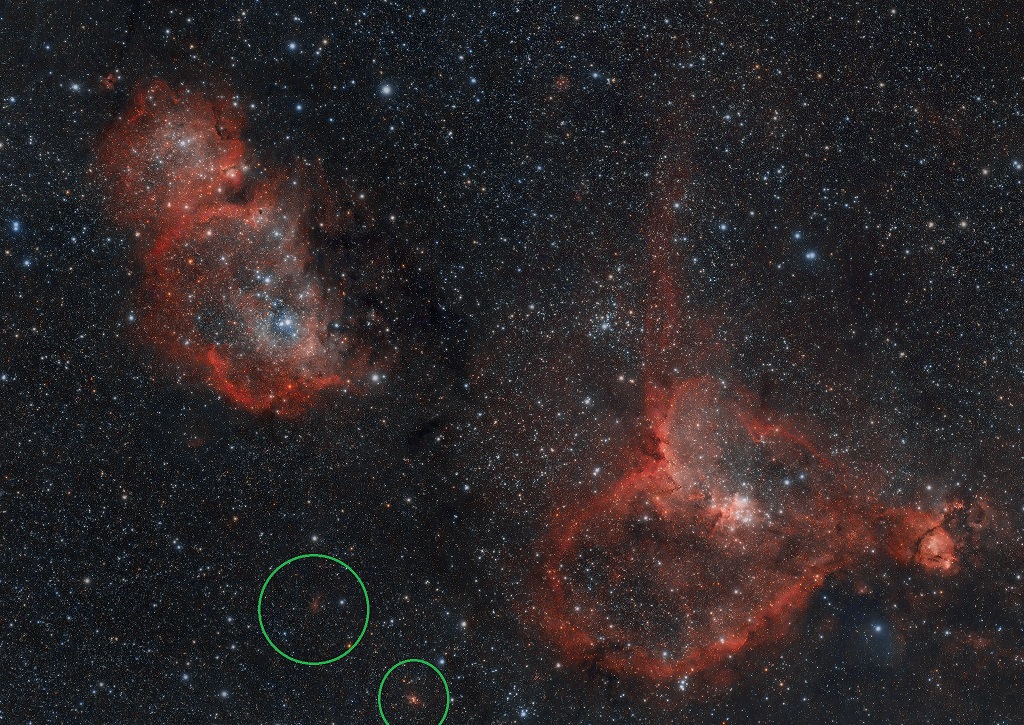
Gratuluję! Piękny obrazek! To tylko 1.5h naświetlania? Wow. Załapały się, jak na każdym podobnym kadrze, moje ulubione i wspomniane już niedawno galaktyki Maffei 1&2:

-
Zagadnienie zbyt małego pixela
Behlur_Olderys odpowiedział(a) na Kapitan Cook temat w Dyskusje o sprzęcie
Oczywiście, cały czas zmierzamy do ustalenia co i jak. Ja cały czas pamiętam, że sygnał od gwiazdy jest splatany po kolei z seeingiem, optyką/dyfrakcją, crosstalkiem itp. Moim zdaniem mamy do czynienia ze splotem przynajmniej 5 funkcji: (spot image)*(Airy pattern)*(seeing Gauss)*(crosstalk Gauss)*(tracking1) Teraz uprośćmy matematykę maksymalnie i powiedzmy, że wszędzie mamy gaussiany i każda funkcja ma swój FWHM. (znając RMS spot image, który zazwyczaj jest podawany można zamodelować go gaussianem, bo tam RMS oznacza - zdaje się - po prostu standardowe odchylenie). Przy splataniu gaussianów powstaje kolejny gaussian, a FWHM dodają się w kwadratach pod pierwiastkiem, jak to zauważył @diver, więc nasz ostateczny obraz gwiazdy na matrycy będzie po prostu kolejną funkcją gaussa o FWHM w którym każdy parametr jest brany pod uwagę. Szacując przynajmniej te 3 najoczywistsze czynniki: spot size, seeing i średnicę Airego, a potem wstawiając do wzoru - moim zdaniem - dostajemy pierwszy rząd przybliżenia wielkości realnego obrazu gwiazdy na matrycy. Następny krok to oczywiście zmierzyć te obrazy dla konkretnej gwiazdy zmieniając niezależnie każdy z 3 parametrów. Może być problem z seeingiem Ale po takim doświadczeniu można by zweryfikować, na ile to przybliżenie jest ok, wyciągnąć jakieś wnioski na przyszłość itp. W ten sposób akt eksperymentu wiąże ze sobą teorię i rzeczywistość 1 tracking to najczęściej kreska. Ja bym w ogóle się akurat montażem nie przejmował, gdy mówimy o optyce. -
Zagadnienie zbyt małego pixela
Behlur_Olderys odpowiedział(a) na Kapitan Cook temat w Dyskusje o sprzęcie
To się wszystko sprowadza do porównania pewnych wielkości - metodycznie, jak już zapoczątkował @diver W najprostszym wypadku trzeba wybrać największą z wielkości: seeing, dyfrakcja, tracking, spot size. Moim zdaniem rozdzielczość teoretyczna - wynikająca z samej dyfrakcji - niemal zawsze będzie najmniej liczącym się przyczynkiem. Poza tym zwracam uwagę na jedną pomijaną chyba jak dotąd rzecz: dyfrakcja, seeing nie zmieniają się zasadniczo w rogu matrycy vs środek. A wady optyczne (spot size) - jak najbardziej. Pytanie, czy chcemy mieć całe pole wolne od aberracji? -
Lol gościu z Rzymu to ustrzelił! Nawet nieodległą Dwingeloo 1! Bosko
-
Od razu mówię, że Maffei 1 nie jest aż tak fotogeniczna, jak jej spiralna koleżanka rzut beretem "w lewo", Maffei 2. Ale ja ją mam już zaklepaną
-
Zagadnienie zbyt małego pixela
Behlur_Olderys odpowiedział(a) na Kapitan Cook temat w Dyskusje o sprzęcie
@diver Ja jestem wyznawcą drogi: duży piksel, duża apertura, duża skala, długie fale ... i dużo kasy więc to tylko sfera marzeń póki co -
Trzeba było wziąć jakiś filtr IR. Tej galaktyki praktycznie nie widać poniżej 600nm. Tak czy inaczej - gratuluję! Zaimponowałeś mi śmiałością! Moim zdaniem to jeden z ciekawszych obiektów w podczerwieni - jest duży, jasny i łatwo go znaleźć. Gdyby ktoś pozbierał IR z podobną pieczołowitością, co OIII do Kalmara, to by była klasa To nie jest maleństwo, to jest wielkości mniej więcej M51 Pisałem krótką wzmiankę o Maffei tutaj: Jak tylko będę miał możliwość, to sam spróbuję strzelić kilka klatek tuż poniżej Serca
-
Zagadnienie zbyt małego pixela
Behlur_Olderys odpowiedział(a) na Kapitan Cook temat w Dyskusje o sprzęcie
Z punktu widzenia w którym nie bierzesz pod uwagę realnych parametrów budowanych teleskopów. Chodzi mi o spot size, o którym pisał wielokrotnie wessel. obrazek ze strony: https://www.noao.edu/swift/proposal/node14.html Przykład pokazuje o czym mówię. Każdy teleskop - każdy indywidualny egzemplarz - ma swoją dokładność wykonania. Wymiary tego spot size np. 10um definiuje - moim zdaniem - najbardziej istotny parametr do decyzji o wielkości piksela. Być może dla fali 550nm w samym środku optycznym będzie on zbliżony do rozdzielczości teoretycznej teleskopu. Ale poza centrum pojawiają się kometki, hełmy, kalafiory i rekiny. Dysponując odpowiednio małym pikselem będziesz widział te zwierzaki na matrycy. Jeśli rozmażą się w seeingu czy trackingu, to przynajmniej będą trochę zaokrąglone i nie takie straszne... Tego nie da się obliczyć prostym wzorem, trzeba mieć spot diagram. To nam daje prawdziwe R, a właściwie jego przestrzenną dystrybucję. Wtedy można dopiero się zastanawiać. Być może spot diagram od biedy dałoby się wyznaczyć empirycznie w domu? To by był wreszcie jakiś postęp w temacie "Jaki wziąć piksel do mojego teleskopu?". Z ciekawych efektów fizycznych dorzucających swoje kamyki do ogródka jest jeszcze "crosstalk" czyli wpadanie fotonów do niewłaściwych pikseli - przenikanie przez ściany, rosnące wraz z długością fali (w 1200nm krzem jest przezroczysty...) -
APM 08279+5255 - kwazar odległy o 12.05 miliarda lat świetlnych
Behlur_Olderys odpowiedział(a) na LibMar temat w Głęboki Kosmos (DS)
Tutaj jest kilka ciekawych obserwacji obiektów o dużym redshifcie: https://astrodrudis.com/ultra-deep-sky/ Jadą tam z redshiftem ponad 7, co wydaje się na granicy "amatorskich" możliwości - mówię to w cudzysłowiu, bo oczywiście używają sporego, zdalnego teleskopu w Australii. Rekordy odległości biją w ekspozycjach kilkuset minut na 17" CDK (swoją drogą - to już są koszta setek złotych za jedno zdjęcie...). Powyżej z=7 nawet seria Lymana (oryginalnie ultrafiolet w okolicy 90nm) wpada poza zakres rejestracji krzemowych CCD (powyżej 1000nm). Chyba najciekawiej wygląda taki strzęp galaktyki z=6.7. -
Perseverance - najbardziej wyrafinowany pojazd na innej planecie
Behlur_Olderys odpowiedział(a) na ekolog temat w Kosmonautyka
Połączyłem dwa tematy o tym samym. -
18 Bieszczadzki Zlot Miłośników Astronomii - Zapisy
Behlur_Olderys odpowiedział(a) na Adamo temat w Spotkania, zloty i imprezy
Najlepiej tylko, dla bezpieczeństwa, wcześniej się zaszczepić na COVID-a. Mam nadzieję że większość już wtedy będzie po szczepionce, ew. z przeciwciałami w inny sposób nabytymi. -
ASI120MM - Pierwsze światło, pierwsze problemy
Behlur_Olderys odpowiedział(a) na Kapitan Cook temat w Dyskusje o astrofotografii
Najlepiej robić dithering, stackować w AS! i zapomnieć o tym całym syfie -
ASI120MM - Pierwsze światło, pierwsze problemy
Behlur_Olderys odpowiedział(a) na Kapitan Cook temat w Dyskusje o astrofotografii
Wgraj pliki (FITS) do PIPP (planetary imaging cośtam darmowe) i daj output format .avi to powinno pomóc Wsadzając filtr R albo jeszcze lepiej IR pass ograniczysz światło jakie wpada, ale polepszysz seeing. Polecam poeksperymentować. Ale tak jak pisał ZbyT, dla refraktora to powinno być bez znaczenia. ASI120 ma dosyć spore piksele, więc crosstalk też nie powinien Cię bardzo martwić. 16bit bym polecał zawsze. Większa rozpiętość tonalna. Nie wiem, jakie mogły by być zyski z 8bit poza dużą ilością FPS, a tego chyba nie potrzebujesz? Do takich zadań radziłbym porzucić DSS, jak radzi Krzysztof, na rzecz Autostakkerta. Moim zdaniem wyszło bardzo fajnie, wchodzisz w dużą skalę Dla M51 jeszcze 4-5x więcej materiału, zrobione w AS! to byś miał moim zdaniem już całkiem fajne zdjęcie. -
Patrzę na półkę w sklepie:
Chile, Australia, Hiszpania, Kalifornia, RPA...
Czy to wina, czy świetne miejsca na postawienie teleskopu?")
-
Automatyczny stack? Czy ja wiem że to najlepsze rozwiązanie? A masz pojedyncze klatki? Ja bym wrzucił je do AstroStakkerta + 1.5x drizzle spróbował... Wiesz, bo jeśli nie wybierzesz choćby 80% najlepszych klatek tylko stackujesz wszystko jak leci - to już w żaden sposób nie jest "lucky" imaging Pociągnięte nieco za mocno, widać szum, ale skala ładna Gdybyś miał wersję w której całość jest ciemniejsza, ale bez szumu, to mógłbyś jeszcze dowalić dekonwolucją i byłoby całkiem przyjemnie.
-
ASI120MM vs Galaktyki
Behlur_Olderys odpowiedział(a) na Kapitan Cook temat w Dyskusje o astrofotografii
Tylko się nie zrażaj. Nie bez powodu nie chwalę się takimi zdjęciami, ale możesz być pewien, że to nie ASI120mm jest tu głównym problemem